

A method for determining key conflict points to ensure the safety of automatic driving intersections
A technology for automatic driving and determining methods, applied in traffic control systems, traffic control systems of road vehicles, instruments, etc., can solve problems such as the increase in the number of control model calculations, the difficulty of model solving, and the inability to obtain feasible solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
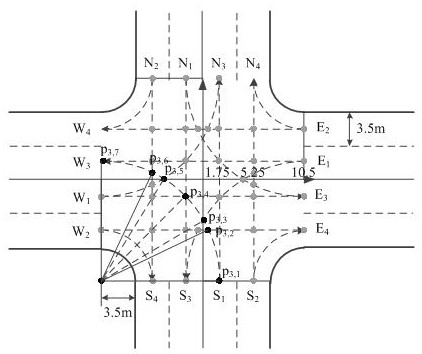
[0045] combined with Figure 1~3 , taking the two-way two-lane orthogonal plane intersection as an example, where the entrance and exit lanes in each direction have two lanes, and the lane width of each lane is 3.5m. Number all lanes according to step 11 and establish rectangular coordinates system; the position point p of the first lane in the direction of the south entrance S,1 The coordinates (x S,1 =1.75,y S,1 =-10.5); the position point coordinates of the first lane in the direction of the west exit are (-10.5, 1.75), and the coordinates of the circle center in the west direction from the south direction (a S,W ,b S,W ) is (-10.5,-10.5), the turning radius L of turning from the south direction to the first lane to the west direction to the first lane S,W,1 =12.25m, obtain path equation according to step 11 formula 2 and be (x+10.5) 2 +(y+10.5) 2 =12.25 2 ,-|a S,W |≤x≤L S,W,k -|a S,W |,-|b S,W |≤y≤L S,W,k -|b S,W |, where -10.5=-|-10.5|≤x≤12.25-|-10.5|=1.75, -...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More