

Multi-UAV cooperative target search method
A target search and multi-UAV technology, applied in the field of UAV control, can solve problems such as poor information fusion and low search efficiency, and achieve the effects of accelerating convergence speed, improving search efficiency, and solving local optimal problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] Hereinafter, specific embodiments of the present invention will be further described in conjunction with the accompanying drawings.
[0093] The invention provides a multi-UAV cooperative target search method, specifically a multi-UAV cooperative target search method based on information fusion based on state prediction consistency and considering communication performance and search performance. This method considers the communication performance and search performance in multi-UAV search tasks, and can be better applied to complex motion environments, especially target search tasks in complex marine environments.
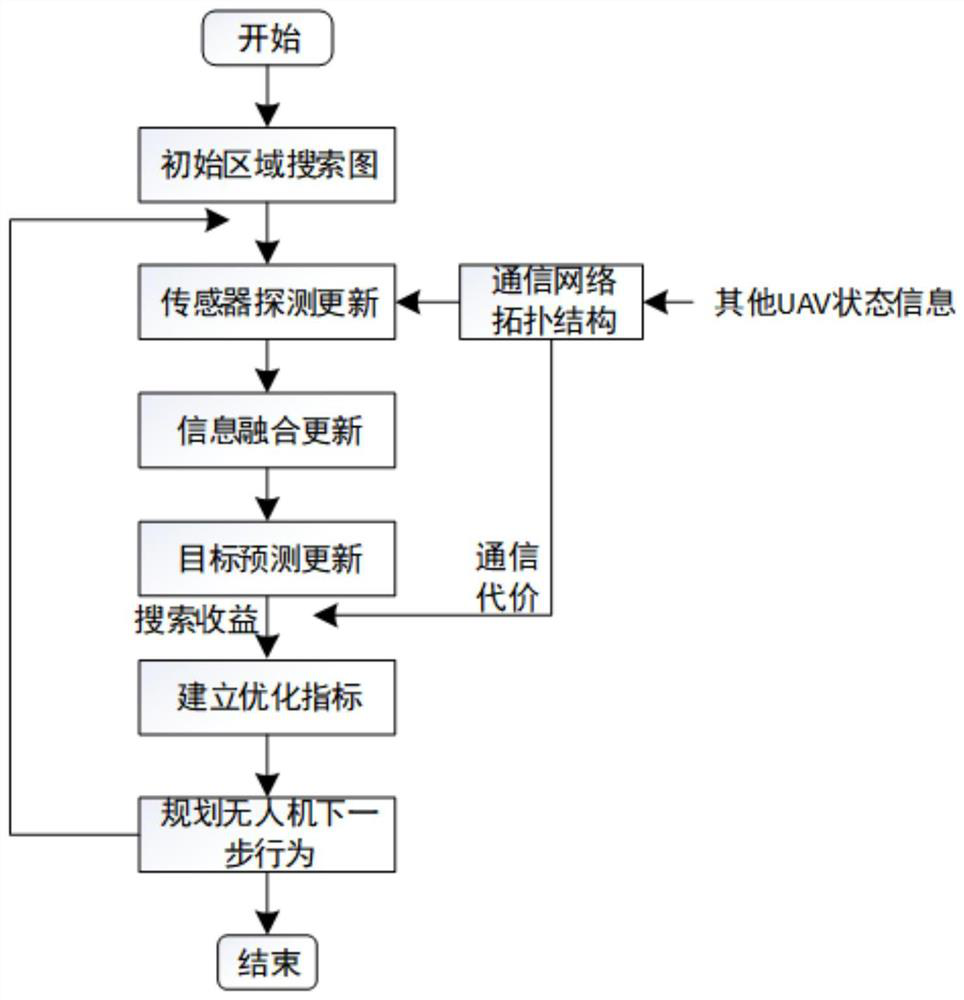
[0094] A multi-UAV cooperative target search method specifically includes the following steps.
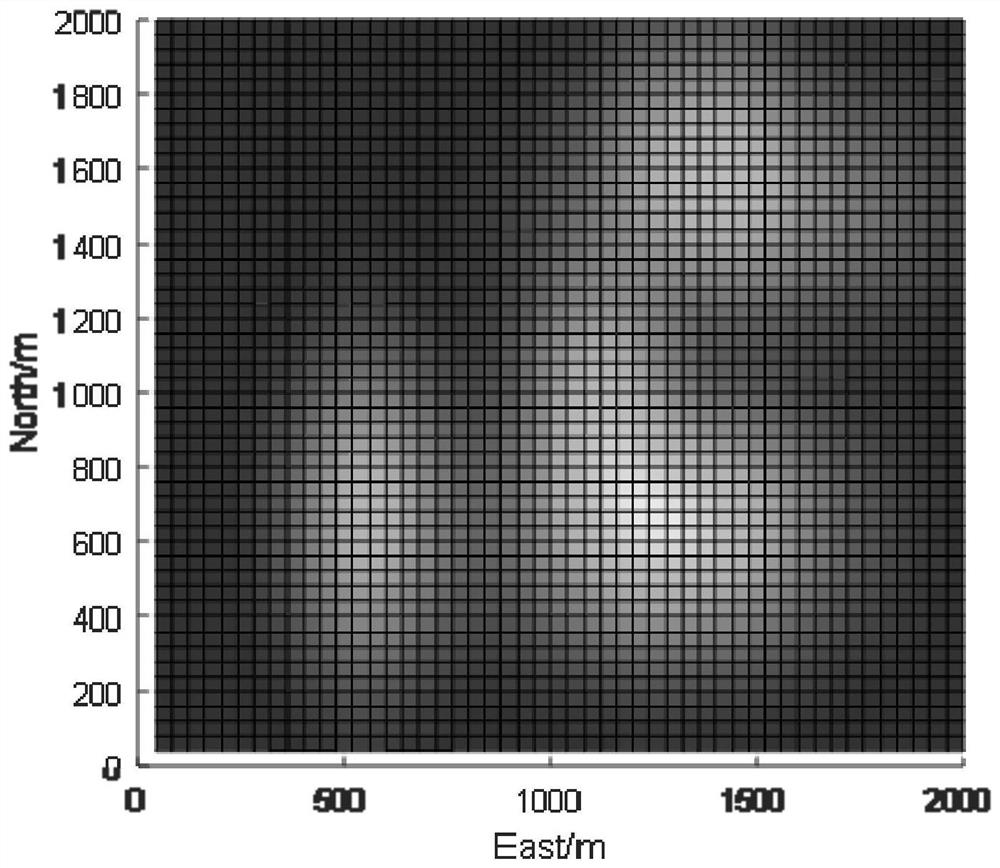
[0095] S1: The prior probability distribution of a single UAV's search target is used as the prior search map of the search area, and the prior search map is iteratively updated to obtain the updated search map of a single UAV.
[0096] The prior probability of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More