A Robot Camera Calibration Method Based on Multi-swarm Particle Parallel Structure Algorithm
A robot camera and calibration method technology, applied in the field of robot camera calibration, can solve the problems of poor algorithm diversity and weak robustness, and achieve the effects of improving robustness, improving calibration accuracy, and avoiding local premature
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
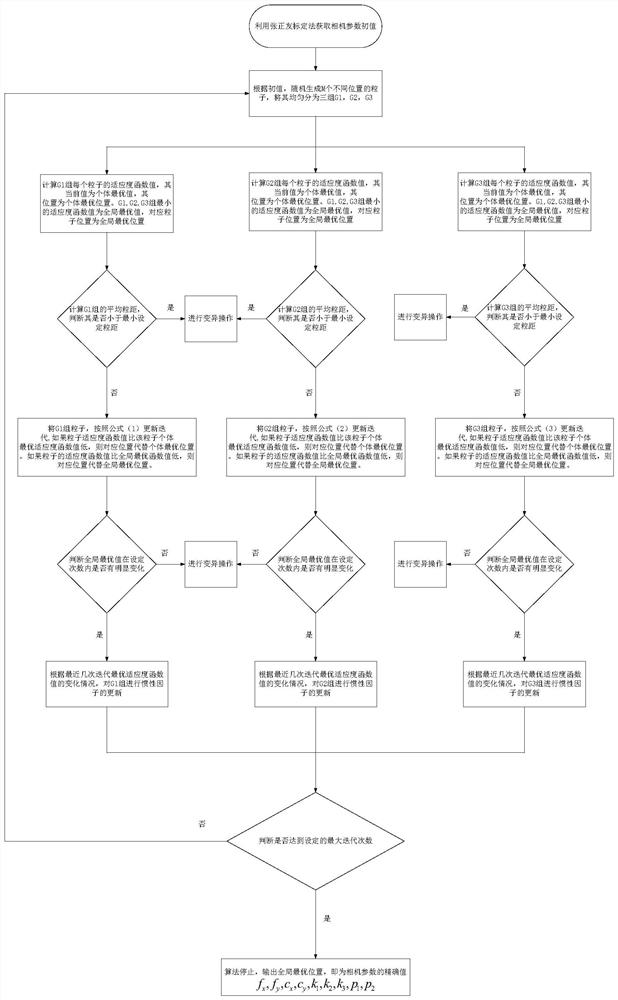
[0039] Such as figure 1 As shown, a robot camera calibration method based on a multi-swarm particle parallel structure algorithm provided by an embodiment of the present invention includes the following steps:
[0040] S100. Obtain the image of the calibration board, and use Zhang Zhengyou's camera calibration method to obtain the initial value of the camera parameter, namely f x , f y ,c x ,c y ,k 1 ,k 2 ,k 3 ,p 1 ,p 2 The initial value of , where f x , f y is the focal length of the camera, in pixels, c x ,c y is the offset from the coordinate origin of the pixel coordinate system to the optical axis, the unit is pixel, f x , f y ,c x ,c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com