

Mapping corresponding mode steering control system and method
A technology of steering control and corresponding mode, applied in steering mechanism, electric steering mechanism, power steering mechanism, etc., can solve the problems of low rotation efficiency and low response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
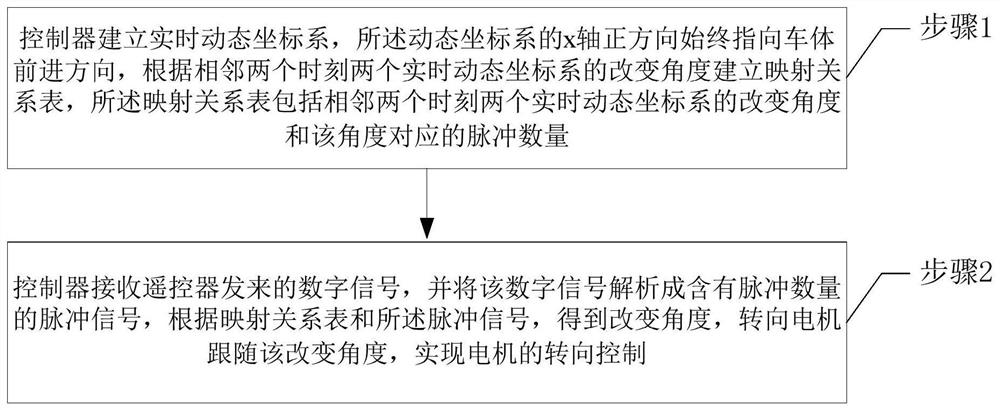
[0018] Specific implementation mode one: refer to figure 1 This implementation mode is specifically described. A mapping corresponding mode steering control method described in this implementation mode includes the following steps:
[0019] Step 1. The controller establishes a real-time dynamic coordinate system, the positive direction of the x-axis of the dynamic coordinate system always points to the forward direction of the car body, and establishes a mapping relationship table according to the change angles of the two real-time dynamic coordinate systems at two adjacent moments, and the The mapping relationship table includes the change angle of two real-time dynamic coordinate systems at two adjacent moments and the number of pulses corresponding to the angle,
[0020] Step 2. The controller receives the digital signal sent by the remote controller, and parses the digital signal into a pulse signal containing the number of pulses. According to the mapping relationship tab...
specific Embodiment approach 2
[0023] Embodiment 2: This embodiment is a further description of the method for controlling steering in a mapping corresponding manner described in Embodiment 1. In this embodiment, the number of pulses is 36,000 in total.
specific Embodiment approach 3
[0024] Embodiment 3: This embodiment is a further description of the method for controlling steering in a mapping corresponding manner described in Embodiment 1. In this embodiment, the change angle is from minus 90 degrees to plus 90 degrees.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More