

Multi-point hanging constant force joint debugging control method and system
A control system and hanging force technology, applied in control/adjustment system, mechanical pressure/force control, non-electric variable control, etc., can solve the problem of under-unloading of gravity, large difference in deviation distribution, over-unloading, etc. problems, to achieve the effect of improving the holding accuracy, improving the uniformity and the synchronization of joint debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036]The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
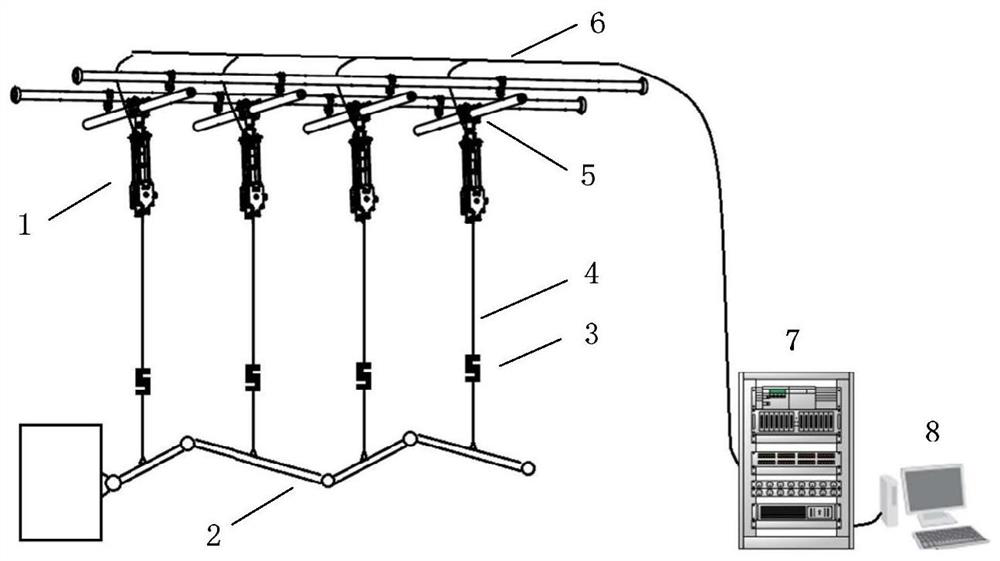
[0037] like figure 1 As shown, the multi-point hanging constant tension system provided by the present invention is used for the gravity unloading of the ground test of the multi-joint mechanism. , Cable 6, PLC motion controller 7, upper computer PC8. Among them, multiple hanging units are installed on multiple groups of two-dimensional guide rail units above through the pulley assembly, and can follow the bottom lifting point to move in the horizontal plane in an active or passive manner to keep the ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More