

Robot development board ROS communication system supporting multiple hardware interfaces
A hardware interface and communication system technology, applied in the field of ROS communication, can solve the problem of less hardware interfaces, and achieve the effect of saving energy consumption, reducing size, and high transmission speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention is described in further detail now in conjunction with accompanying drawing.
[0047] It should be noted that terms such as "upper", "lower", "left", "right", "front", and "rear" quoted in the invention are only for clarity of description, not for Limiting the practicable scope of the present invention, and the change or adjustment of the relative relationship shall also be regarded as the practicable scope of the present invention without substantive changes in the technical content.
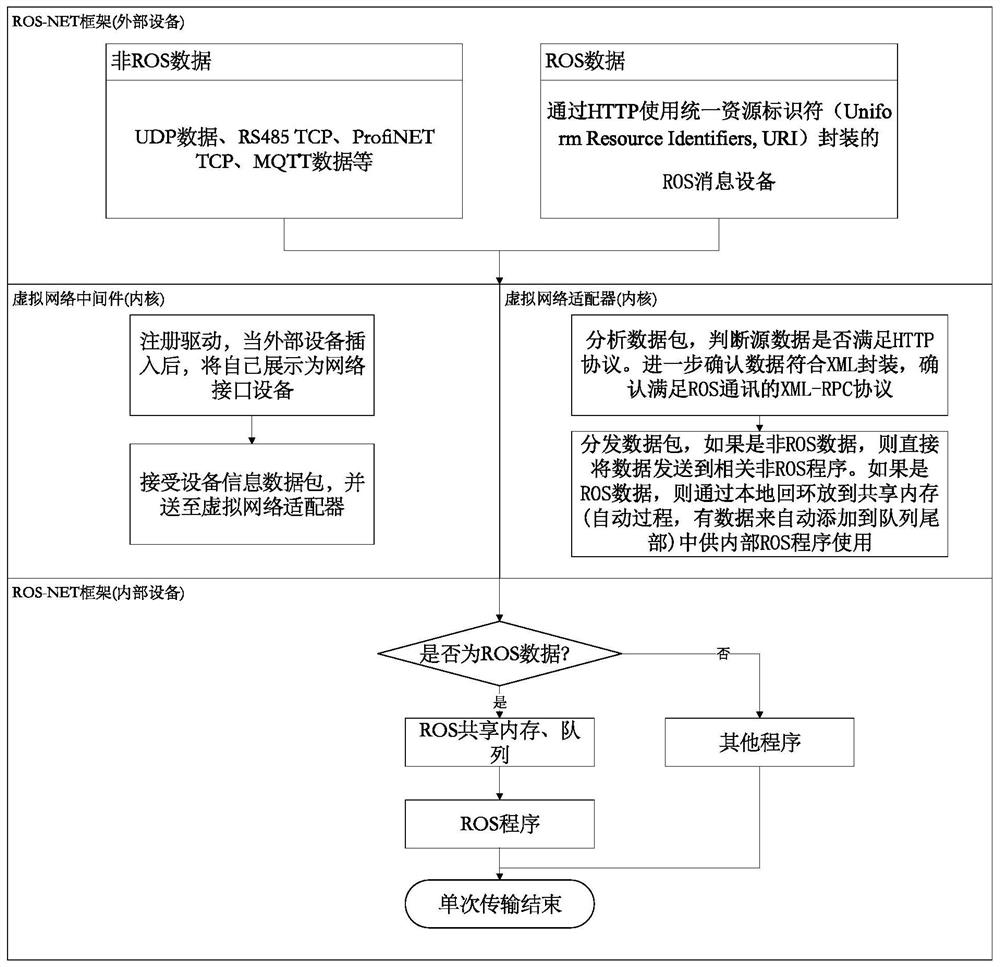
[0048] combine figure 1 , the present invention refers to a robot development board ROS communication system supporting multiple hardware interfaces, and the ROS communication system includes a virtual network middleware and a virtual adapter.
[0049] The virtual network middleware is used to virtualize different types of hardware interfaces corresponding to lines into network interfaces, and support native ROS communication through virtual IP.
[0050] The virtu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More