

Human face feature point auxiliary labeling method
A technology of facial features and feature points, applied in the field of auxiliary labeling of facial feature points, can solve the problems of large impact on labeling accuracy, low labeling efficiency, and insufficient applicability, and achieve wide applicability, improve labeling efficiency, and distribute reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
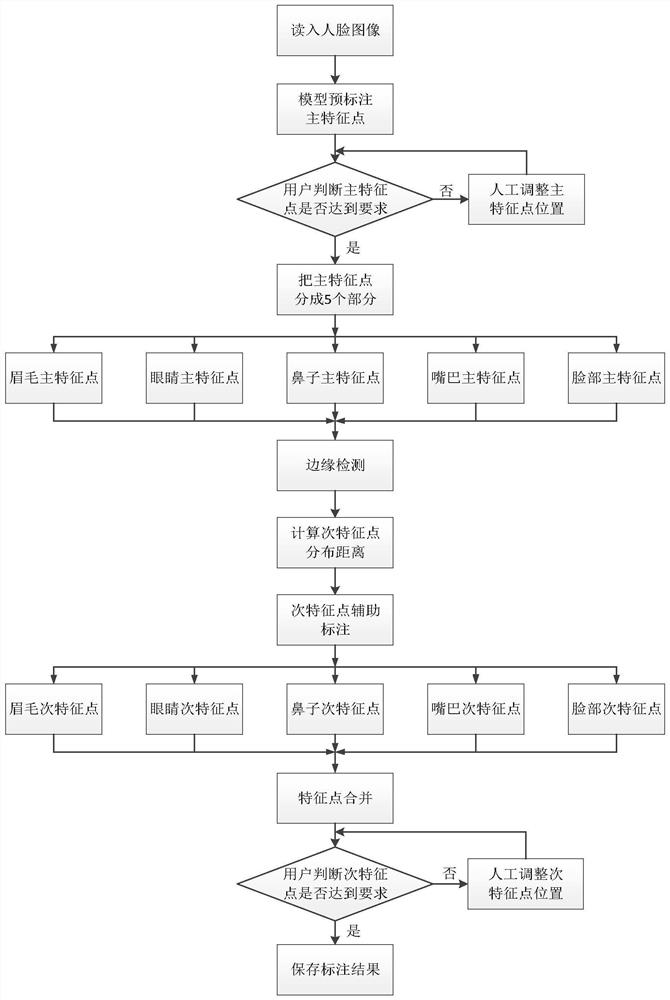
[0041] The present invention provides a face image feature point auxiliary labeling method, which can be divided into three parts: primary feature point pre-labeling, secondary feature point auxiliary labeling, and manual adjustment of feature points. The specific implementation process is as follows: figure 1 shown. In this scheme, a main feature point design scheme can be combined with multiple secondary feature points. For the design scheme of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More