

The Control Method of the Optimal Vehicle Distance for Collision Avoidance
A control method and vehicle distance technology, which is applied to the control system of the transportation center, electric vehicles, vehicle components, etc., can solve the problems of poor effect, regardless of the instability of vehicle speed and the real-time demand of actual passengers, and achieve the improvement of ride quality. The effect of experience
Active Publication Date: 2022-06-03
NANJING UNIV OF POSTS & TELECOMM
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] In the existing unmanned driving control methods, the control method of maintaining the minimum safe distance is adopted, that is, the distance between the trains is kept constant, and the instability of the vehicle speed and the real-time demand of the actual passengers are not considered, and the effect is not good.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
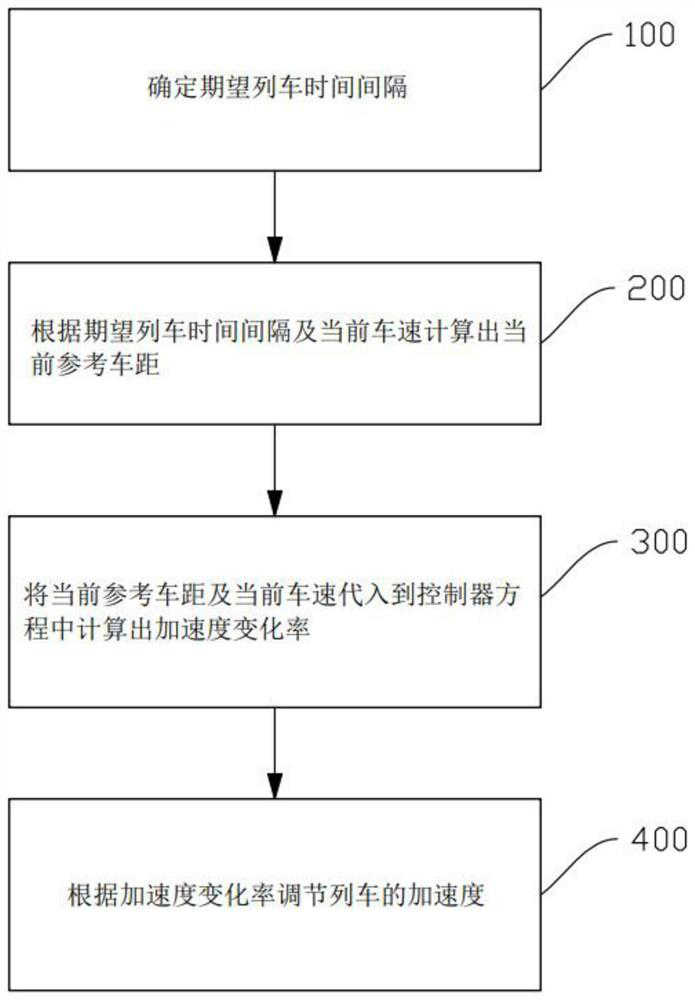
[0028] Step 400: Adjust the acceleration of the train according to the acceleration rate of change.
[0032]
[0037]
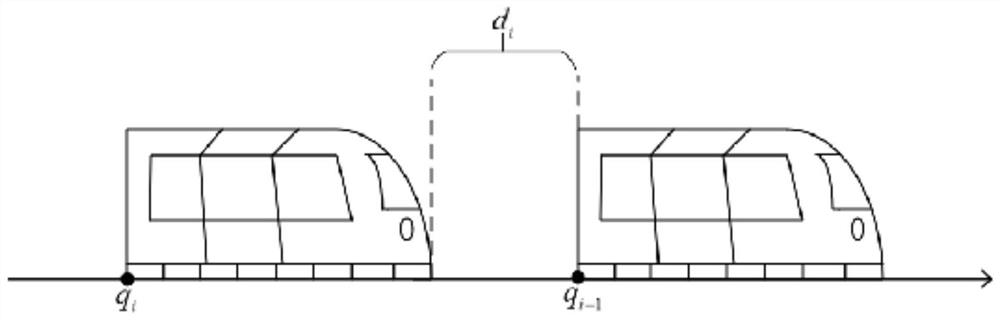
[0040] Suppose it is the reference distance that the train needs to keep, and h is a specified time interval. which is
[0041]
[0043]
[0045]
[0047]
[0051]
[0053]
[0055]
[0059]
[0060] In the formula, P and R are symmetric positive definite matrices, therefore, the function V(t)>0.
[0062]
[0064]
[0065]
[0067]
[0069]
[0072]
[0074]
[0076]
[0078]
[0080]
[0081]
[0083]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The present invention discloses a control method for anti-collision optimal vehicle distance, which specifically includes the following steps: Step 100: Determine the expected train time interval; Step 200: Calculate the current reference distance according to the expected train time interval and the current vehicle speed; Step 300 : Substituting the current reference vehicle distance and the current vehicle speed into the controller equation to calculate the acceleration rate; Step 400 : adjusting the acceleration of the train according to the acceleration rate. According to the control method of the anti-collision optimal vehicle distance of the above-mentioned technical scheme, the distance between the trains can be dynamically adjusted according to the speed of the trains, so as to ensure safety while maximizing the use of the track, ensuring that the interval time between trains arriving at the station is a fixed value, and improving Passenger ride experience.
Description
A Control Method of Optimal Vehicle Distance for Collision Avoidance technical field [0001] The present invention relates to the field of train control, in particular to a method for controlling the optimal distance between vehicles for collision avoidance. Background technique With the gradual coverage of 5G technology, the rapid development of industrial computer technology and remote control technology has stimulated the The development of human driving technology. At present, fully automatic driverless trains in many countries have been put into operation. The human driving mode (GoA4 mode) is the latest driving mode. In the existing unmanned control method, all adopt the control mode of keeping the minimum safe distance, namely keep the train The distance between them is unchanged, and the effect is not good without considering the instability of the speed and the real-time demand of the actual passengers. SUMMARY OF THE INVENTION Object of the invention: t...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B61L27/16B61L27/20B61L27/04B61L23/00
CPCB61L27/04B61L23/00B61L27/16B61L27/20Y02T10/72
Inventor周颖郑颖
OwnerNANJING UNIV OF POSTS & TELECOMM