

Full-drive ship trajectory tracking control method and system based on instruction filtering neural network controller
A ship trajectory and tracking control technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as poor navigational applicability of full-drive ships, and achieve the effect of optimizing trajectory output performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
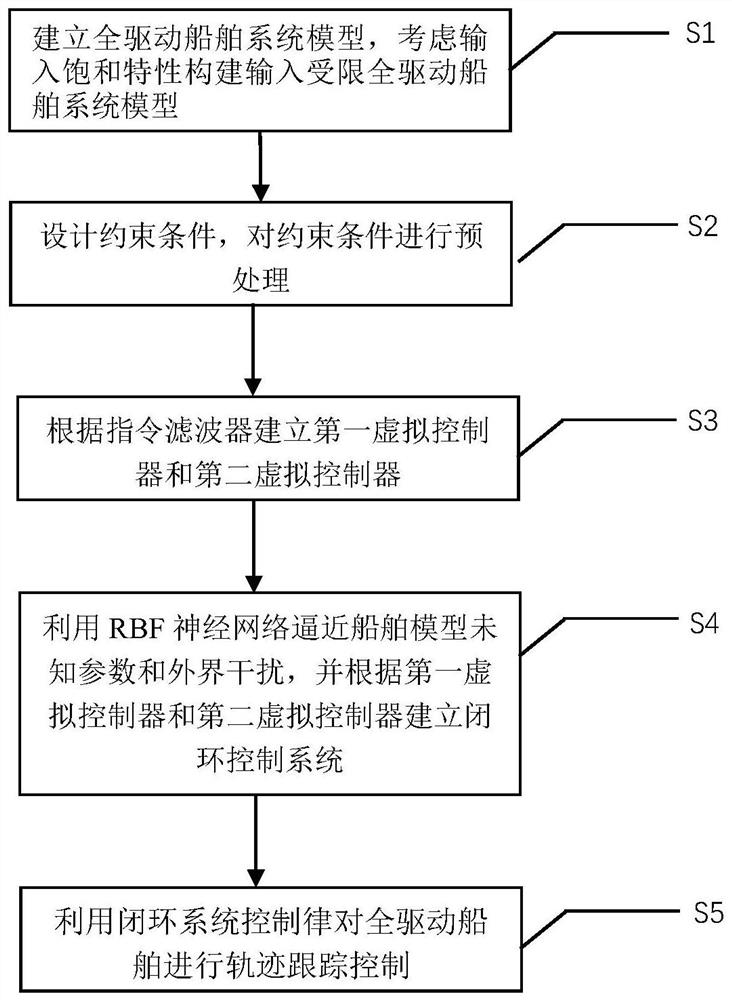
[0112] Such as figure 1 As shown, the present invention provides a kind of all-drive ship trajectory tracking control method based on command filter neural network controller, and this method comprises the following steps:
[0113] Step S1: Establish the full-drive ship system model, and consider the input saturation characteristics to construct the input-limited full-drive ship system model. The specific process is as follows:
[0114] Define the inertial coordinate system O-X0Y0Z0, where the O-X0 axis points to the true north direction, the O-Y0 axis points to the true east direction, and the O-Z0 axis points to the direction of the center of the earth. Assuming that the ship is left-right symmetrical, define the appendage coordinate system D-XYZ, where D represents the geometric center point of the bow-stern line of the ship, the D-X axis extends from the ship’s geometric center point to the bow, and the D-Y axis extends from the ship’s geometric center point to the starboa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More