

Formation control method of mobile robots under constraint of communication range
A mobile robot, communication range technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system and other directions, can solve problems such as collision, measurement failure, affecting system performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
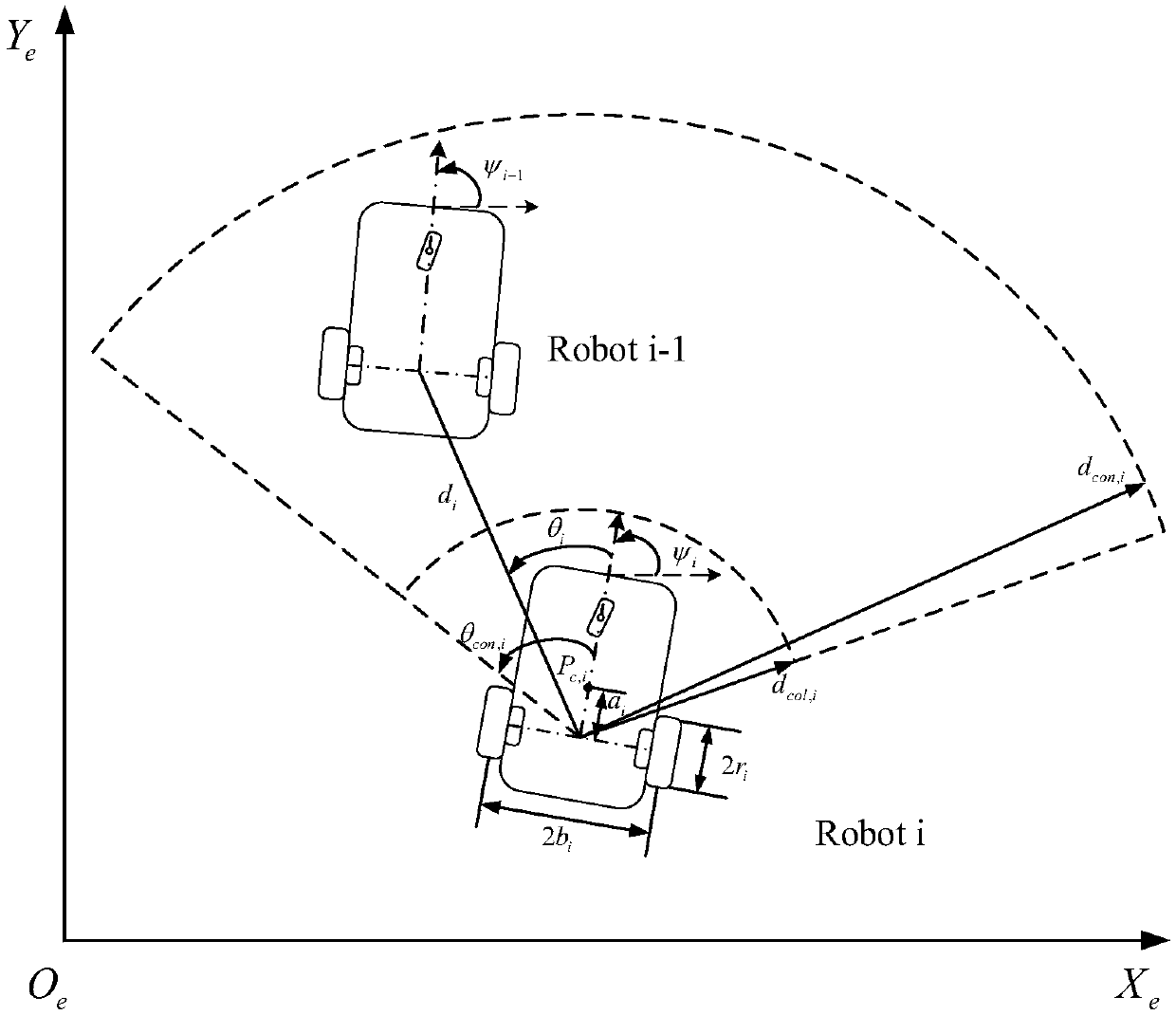
[0074] The leader-follower formation control of the mobile robot under the constraint of the communication range, there are 4 mobile robots in the formation, figure 1 Schematic diagram of leader-follower formation for mobile robots under the constraints of communication range.
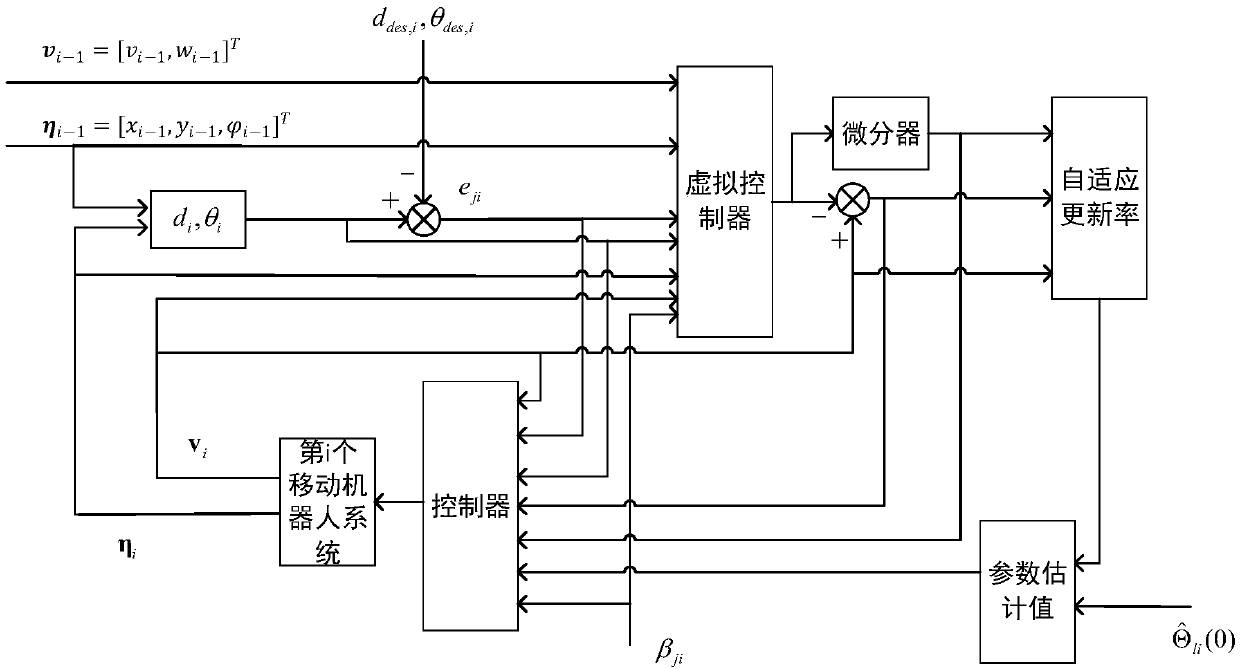
[0075] like figure 2 Shown is the overall control block diagram of the leader-follower formation control method of the mobile robot under the constraint of the communication range. The detailed implementation process of the control method includes the following steps:
[0076] Step (1): Establish the dynamic model of the mobile robot in the leader-follower formation structure, and expand the dynamic model in vector form into scalar form;
[0077] Establish the system model of the ith (i=1,2,3,4) mobile robot in the leader-follower formation structure, and its vector form is:
[0078]
[0079] in, is the position of the i-th mobile robot (x i ,y i ) and direction ω i =[ω 1i ,ω 2i ] T is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More