AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A map construction and map technology, applied in image enhancement, image analysis, image data processing, etc.
Pending Publication Date: 2021-04-09
HANGZHOU HIKVISION DIGITAL TECH
View PDF0 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
This method of building SLAM maps based on SLAM technology is only applicable to situations where the scene in the physical area remains unchanged (that is, there is a static scene in the physical area)
[0004] However, when the scene in the physical area changes over time (that is, there are dynamic scenes in the physical area), the above method of building a SLAM map based on SLAM technology does not involve the update of the SLAM map, so this method is not applicable to In this case
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
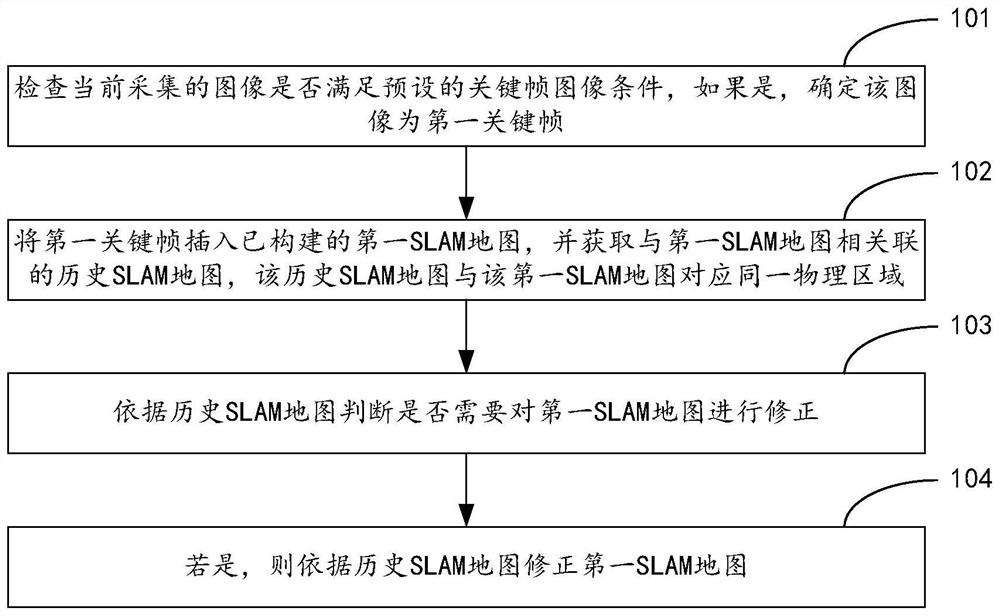
[0063] See figure 1 , a flow chart of an embodiment of a SLAM-based map construction method provided in an exemplary embodiment of the present application, the method may include the following steps:
[0064] Step 101: Check whether the currently collected image satisfies the preset key frame image condition, and if so, determine that the image is the first key frame.
[0065] In the embodiment of the present application, an intelligent robot is used as an example to execute the method provided in the present application. The intelligent robot is equipped with a camera module, which can collect images of the current physical area through the camera module.
[0066] Every time the intelligent robot collects an image, it can detect whether the image meets the preset key frame image condition, and if so, the image can be determined as the first key frame. As for the image condition of the key frame, reference may be made to the above description, which will not be repeated here....
Embodiment 5
[0147] See Image 6 , an embodiment flowchart of the process of deleting redundant key frames in the first SLAM map provided by an exemplary embodiment of the present application may include the following steps:
[0148] Step 601: Group all key frames in the first SLAM map to obtain at least two key frame groups.
[0149] In the embodiment of the present application, firstly, a keyframe tree may be generated by using all keyframes in the first SLAM map according to the maximum spanning treealgorithm. For example, if Figure 7 Shown is an example of a keyframe tree, Figure 7 The keyframe tree illustrated in includes 7 nodes from K1 to K7, and each node represents a keyframe in the first SLAM map.
[0150] Afterwards, the root node of the key frame tree, such as node K1, is used as the current node, and for each other node in the key frame tree except the current node, the position of the current node and the other nodes is calculated. If the first value is smaller than th...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a map construction method and device based on SLAM. The method comprises the steps: checking whether a currently collected image meets a preset key frame image condition or not, and determining that the image is a first key frame if the currently collected image meets the preset key frame image condition; inserting the first key frame into a constructed first SLAM map, wherein a historical SLAM map associated with the first SLAM map is acquired, and the historical SLAM map and the first SLAM map correspond to the same physical area; judging whether a first SLAM map needs to be corrected or not according to the historical SLAM map; if so, correcting the first SLAM map according to the historical SLAM map. By applying the method, the SLAM map is constructed for the dynamic scene, and the constructed SLAM map is corrected according to the historical SLAM map of the same physical area in the process of constructing the SLAM map, so that the accumulative error of the constructed SLAM map can be reduced, and the long-term reusability and expandability of the constructed SLAM map are further improved.
Description
technical field [0001] The present application relates to the technical field of SLAM, in particular to a SLAM-based map construction method and device. Background technique [0002] The goal of SLAM (Simultaneous Localization And Mapping, synchronous localization and mapping) technology is that terminals such as drones and intelligent robots start to move from an unknown position in an unknown environment, and position themselves according to sensor data during the movement process, and construct SLAM map of the unknown environment. [0003] At present, a common way to build a SLAM map based on SLAM technology is to fuse sub-SLAM maps corresponding to the same physical area constructed by multiple terminals such as drones and intelligent robots based on SLAM technology to obtain the global SLAM of the area. map. This method of building a SLAM map based on SLAM technology is only applicable to the situation that the scene in the physical area is constant (that is, there is...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More