

Modeling method for fold-type soft actuator device
A technology of actuators and software, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as increasing the difficulty of analyzing mechanical properties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
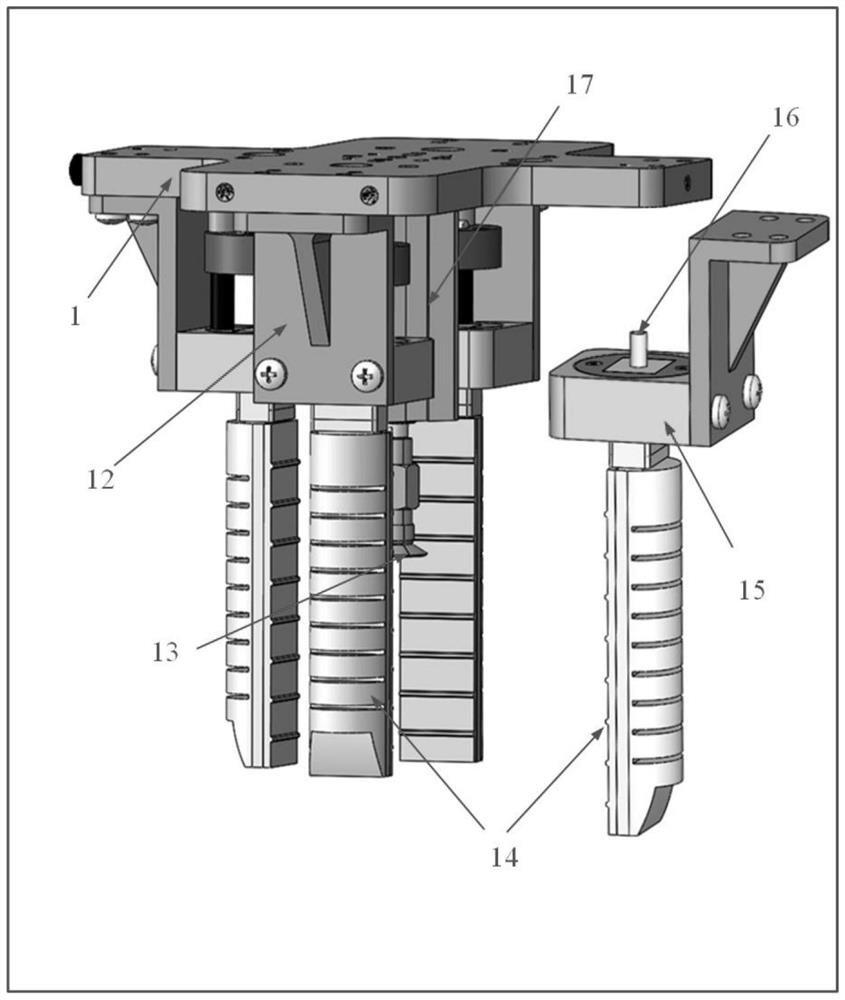
[0034] Such as figure 1 As shown, the folded pneumatic soft actuator device provided in this embodiment includes 11 base plate, 12 finger holder, 13 movable suction cup, 14 soft finger, 15 air tube, 16 fixed station, 17 suction cup holder. Each finger is connected with an air pump, and the air pressure input is controlled by a computer controlling the input of the air pump. The four fingers and the movable suction cup in the middle cooperate to complete the grabbing and adsorption functions. The example of the present invention only performs mathematical modeling analysis on one of the fingers.
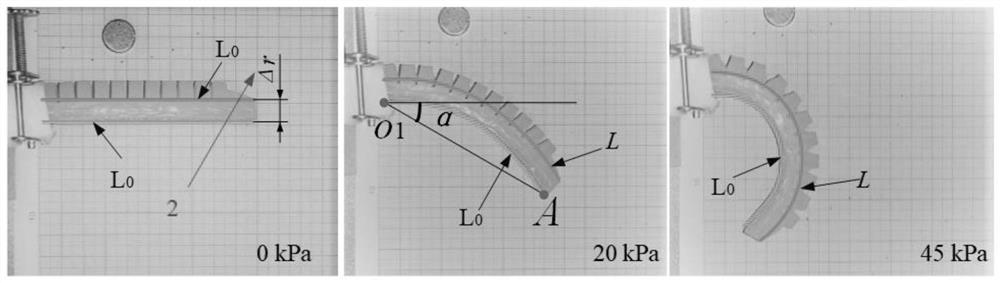
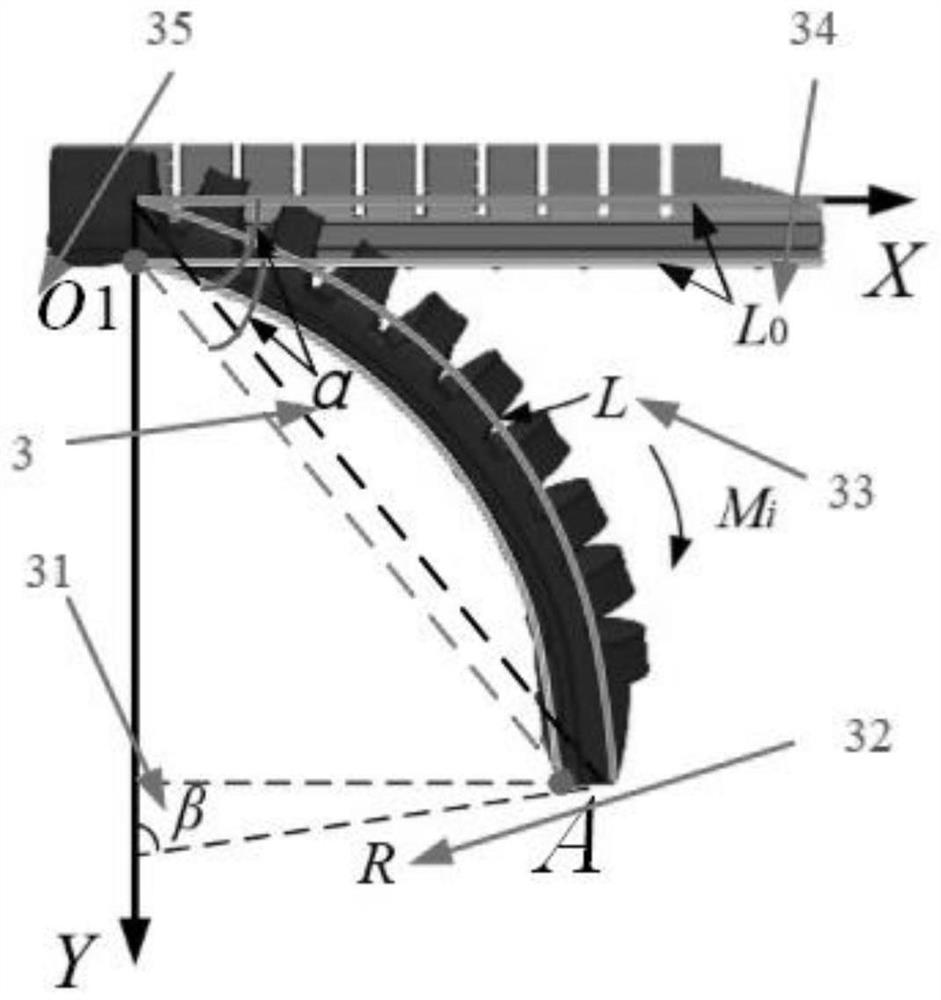
[0035] Such as figure 2 As shown, although the air cavity of the soft finger is designed as a discrete structure, in actual driving, the gap between the air cavities will not have a great impact on the bending shape of the soft finger, and the finger can still be regarded as a normal Curvature arc bending deformation, according to the geometric principle, the bending angle α of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More