

A self-driving road roller autonomous obstacle avoidance method
An unmanned, road roller technology, applied in the direction of motor vehicles, vehicle position/route/height control, instruments, etc., can solve the problem that the construction quality and construction efficiency of road rollers cannot be guaranteed, achieve better obstacle avoidance effect, and ensure construction quality. , the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
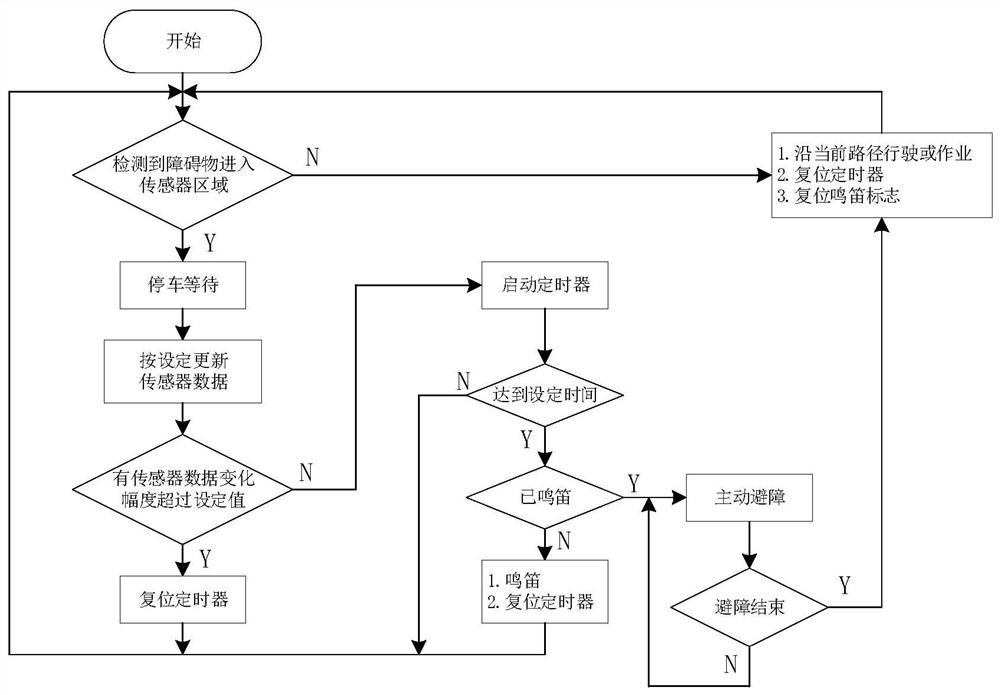
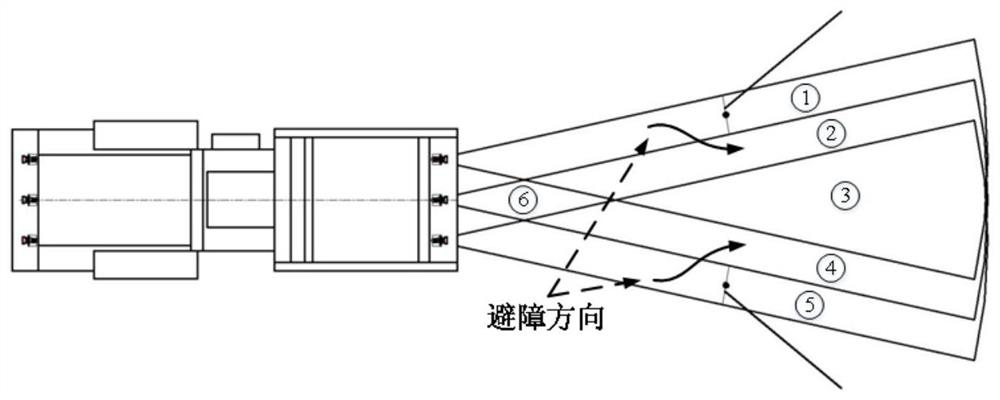
[0057] An autonomous obstacle avoidance method for an unmanned road roller, the process of which is as follows figure 1 with Image 6 shown, including:
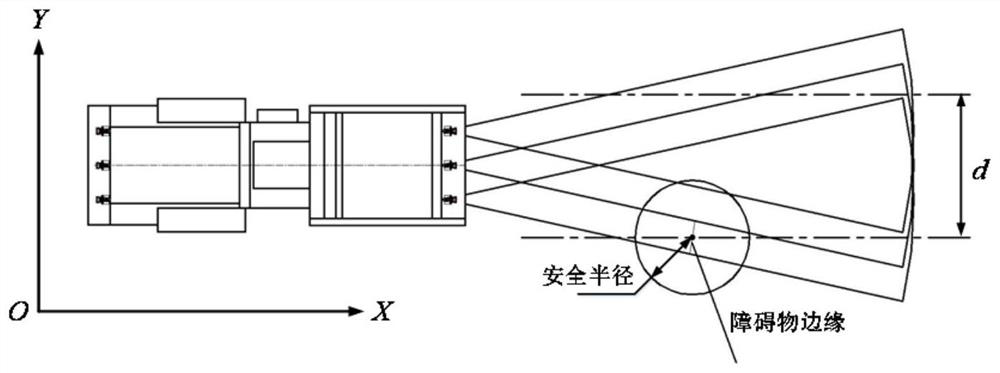
[0058] Step 1: Obtain in real time the data collected by three ultrasonic sensors installed on the front or rear of the unmanned road roller;
[0059] Three ultrasonic sensors are installed symmetrically on each of the front and rear car bodies. They measure the distance from themselves to obstacles and convert them into analog quantities and input them to the on-board controller. The on-board controller sends the detection distance of the sensor to the industrial computer through the CAN bus. Obstacle detection and local path planning are carried out based on the received sensor data; when no obstacle is detected by the ultrasonic sensor, the unmanned road roller continues to drive or work along the current path. When the ultrasonic sensor detects an obstacle, the roller will give priority to stop and wait.
[0060] Step ...
Embodiment 2
[0113] (1) First, if figure 1 As shown, according to the data detected by the ultrasonic sensor, the different situations encountered by the unmanned road roller during driving or operation are judged, and the behavior unit is selected accordingly. The order of judgment in the policy is as follows:
[0114] 1) When the road roller does not detect any obstacle entering the sensor area, the road roller will continue to drive or work along the current path; when an obstacle is detected to enter the sensor area, the road roller will give priority to the parking and waiting action.
[0115] 2) When the road roller detects an obstacle and stops, take the ultrasonic sensor data detection period of 1s and the judgment value of whether the obstacle is moving or not ±10cm as an example, if the sensor’s previous 1s data and the current data change range exceeds ±10cm, it is considered an obstacle The object is in motion and the sensor data is updated. If the change of the two data befo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More