

A flying robot and its flying method
A flying robot and body technology, applied in the field of flying robots, can solve problems such as inability to realize multi-modal conversion, single flight attitude, and single motion mode, and achieve the effects of compact structure, reduced closed body, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
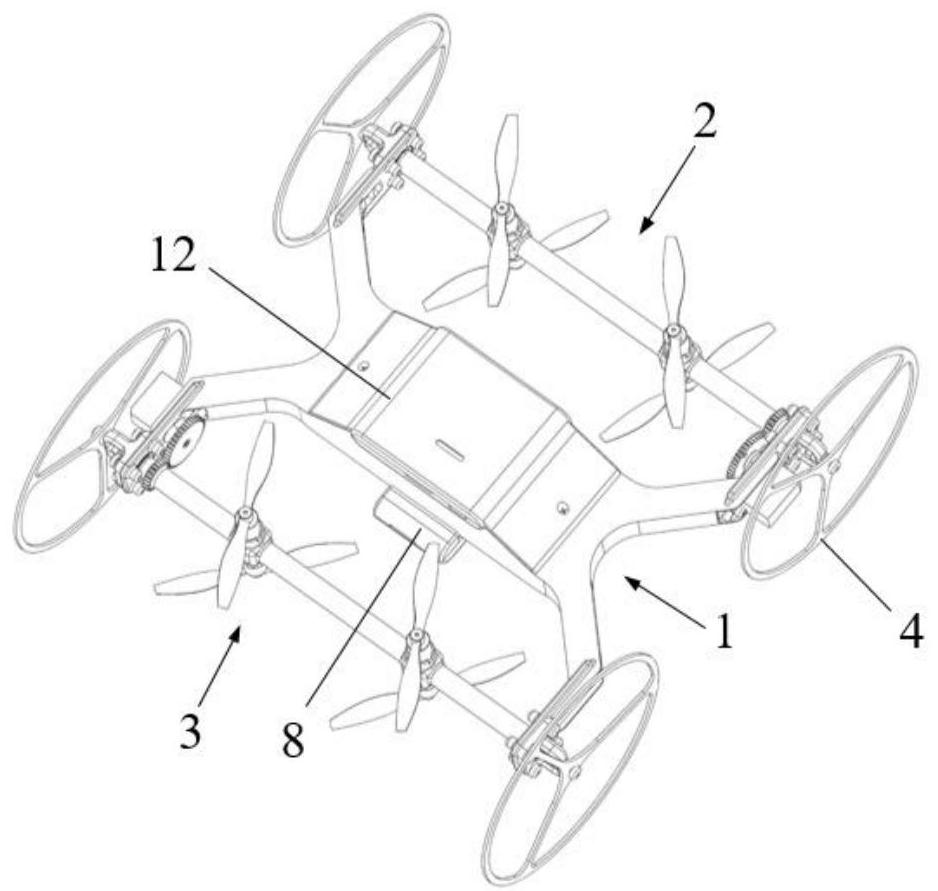
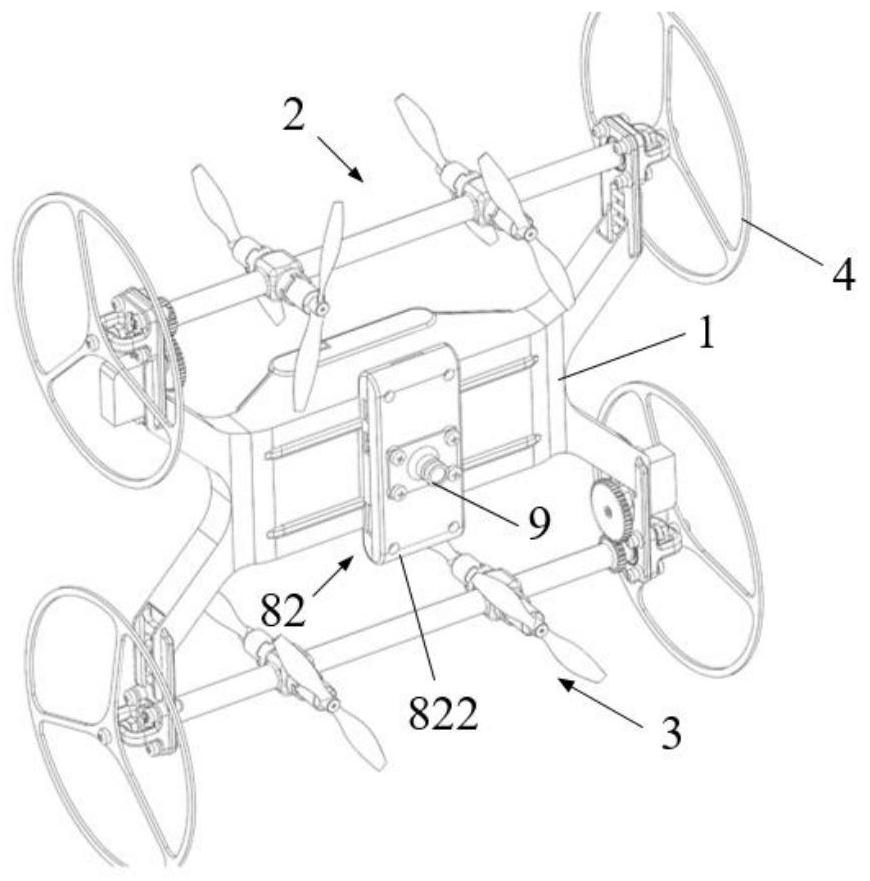
[0061] A specific embodiment of the present invention, such as Figure 1-Figure 9 As shown, a flying robot is disclosed, including a closed body 1, a first vector rotor 2, a second vector rotor 3 and wheels 4, and the first vector rotor 2 and the second vector rotor 3 are respectively provided at both ends of the closed body 1 , the wheels 4 are arranged at both ends of the first vector rotor 2 and the second vector rotor 3;
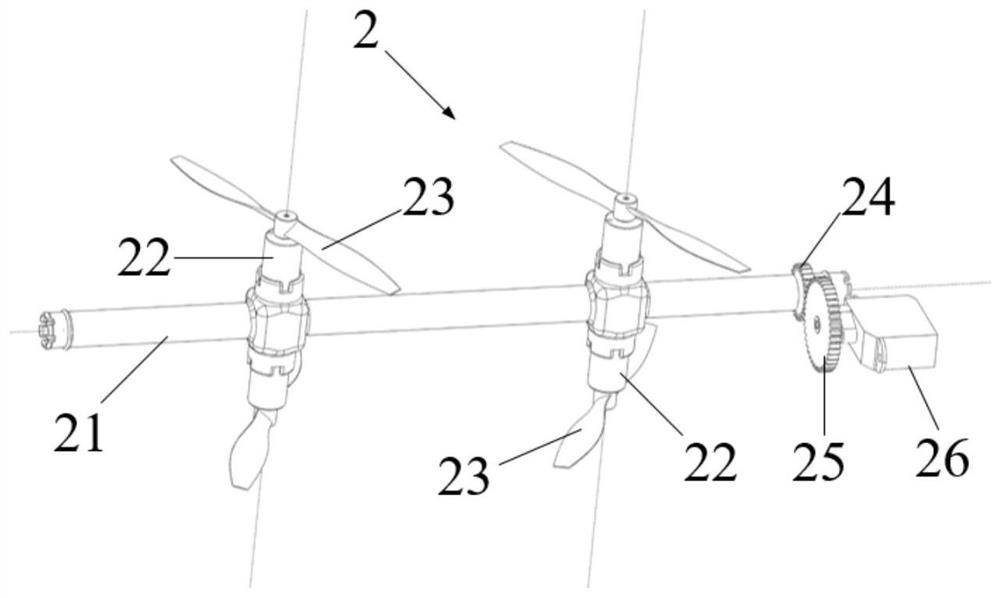
[0062] The flying robot 100 can hover in the air at any pitch angle, the first vector rotor 2 can rotate 360° around the central axis of the first arm 21 , and the second vector rotor 3 can rotate 360° around the central axis of the second arm 31 . °Rotate.
[0063] Compared with the prior art, the flying robot provided in this embodiment has wheels at the four corners of the closed body, so that the robot can not only fly, but also crawl on land, walls or other objects. Both the two vector rotors can achieve 360° rotation, which enables the flying rob...
Embodiment 2
[0089] Another specific embodiment of the present invention, such as Figure 10-Figure 23 As shown, a flying method of a flying robot is disclosed, using the flying robot 100 of Embodiment 1, including the hovering mode of changing attitude in the air, the crawling mode of 200 on the ground and the crawling mode of 300 on the wall, and can change the attitude in the air Hover mode, ground 200 crawling mode and wall 300 crawling mode conversion.
[0090] Compared with the prior art, the variable mode method of the flying robot 100 provided in this embodiment can realize the hovering in the air at any pitch angle of the closed body 1 of the flying robot 100, and can realize the control of the variable attitude hovering mode, the ground The arbitrary conversion between the 200 crawling mode and the 300 crawling mode on the wall expands the application scope and application prospect of the flying robot 100 .
[0091] In this embodiment, the hovering with changing attitude means t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More