

Mechanical arm grabbing system based on depth camera and control method
A technology of depth camera and control method, applied in the field of machine vision and deep learning, can solve the problems of poor adaptability and high development difficulty, and achieve the effect of lowering the threshold, strong scalability, and realizing dynamic grasping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
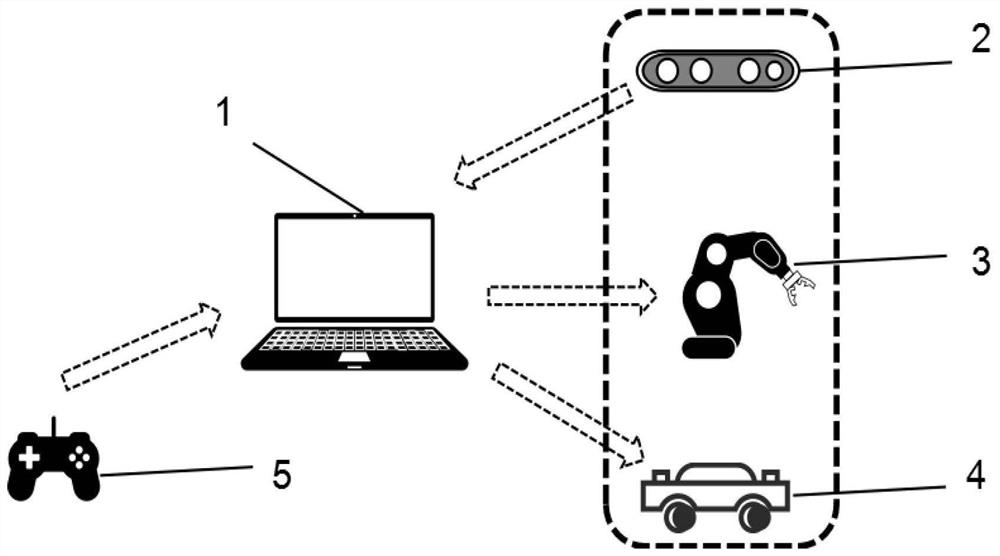
[0043] Such as figure 1 As shown, a depth camera-based robotic arm grasping system provided in this embodiment includes a computer 1 , a depth camera 2 , a robotic arm mechanism 3 , an AGV trolley 4 and a remote controller 5 . The computer is equipped with and runs ROS, which is used to realize target object detection calculation, manipulator control calculation and AGV trolley control calculation; depth camera 2 is connected to computer 1; manipulator mechanism includes manipulator, gripper installed at the end of manipulator, manipulator Drive and the controller of the robotic arm. After receiving the grasping instruction from the computer, the controller of the robotic arm drives and controls the jaws to grab the target object through the driving of the robotic arm. The AGV car includes a mechanical part, a driving part and a control part, and the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More