

Monocular unsupervised depth estimation method based on CBAM
A depth estimation, unsupervised technology, applied in neural learning methods, computing, computer components, etc., can solve problems such as restricting generalization ability, and achieve the effect of retaining depth details and improving depth estimation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, it should be understood that following specific embodiment is only for illustrating the present invention and is not intended to limit the scope of the present invention.
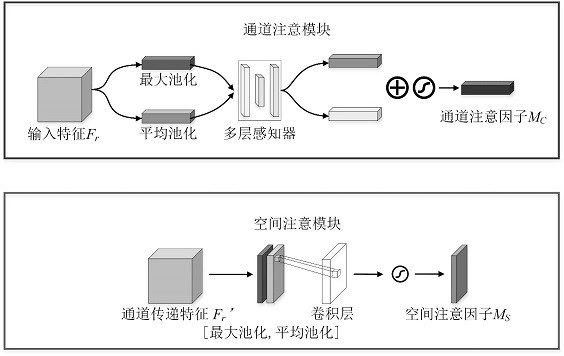
[0053] A CBAM-based monocular unsupervised depth estimation method described in the present invention, such as figure 1 As shown, firstly, CBAM is combined with Resblock to form Resblock-CBAM, then a depth estimation network with attention mechanism is designed based on Resblock-CBAM, and finally the depth estimation network is implemented for photometric reconstruction, parallax smoothing and left-right parallax consistency of stereo image pairs. Training, and complete the depth estimation of the monocular image; including the following specific steps:
[0054] Step 1), introducing CBAM and combining Resblock into Resblock-CBAM, including the following specific steps:
[0055] a), set t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More