

Feeding speed planning method and device for parallel machining robot
A feed speed and robot technology, applied in the direction of instruments, adaptive control, control/adjustment system, etc., can solve the problem of optimal feed speed planning efficiency of parallel processing robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the purpose, technical solution and advantages of the application clearer, the technical solution of the application will be clearly and completely described below in conjunction with specific embodiments of the application and corresponding drawings. Apparently, the described embodiments are only a part of the embodiments of the present application, rather than all the embodiments. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
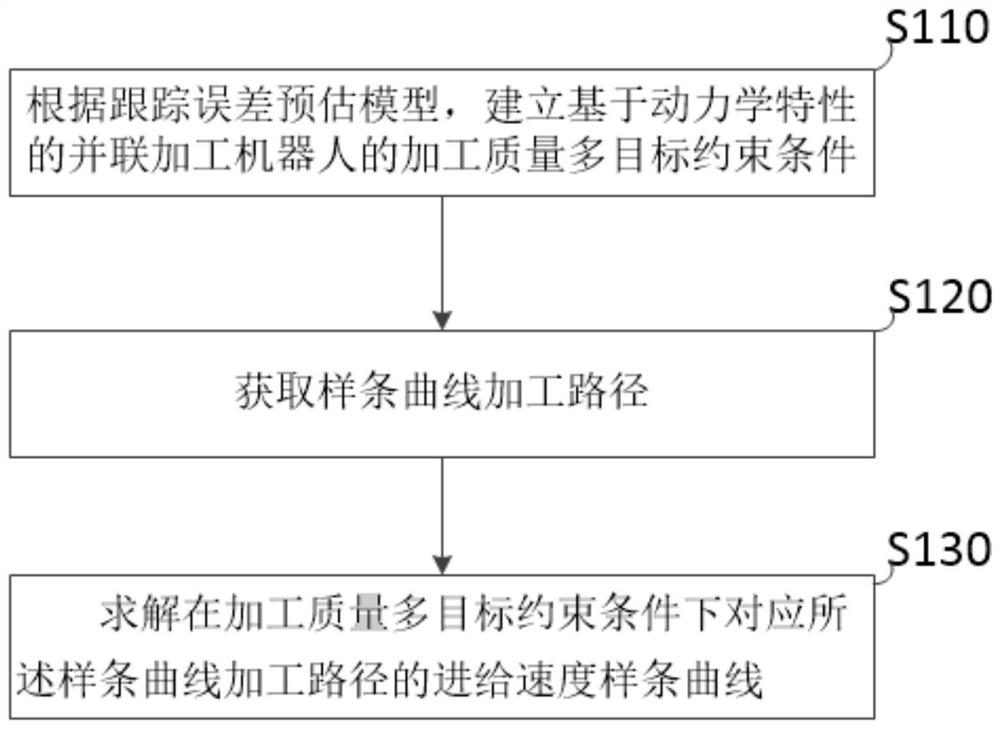
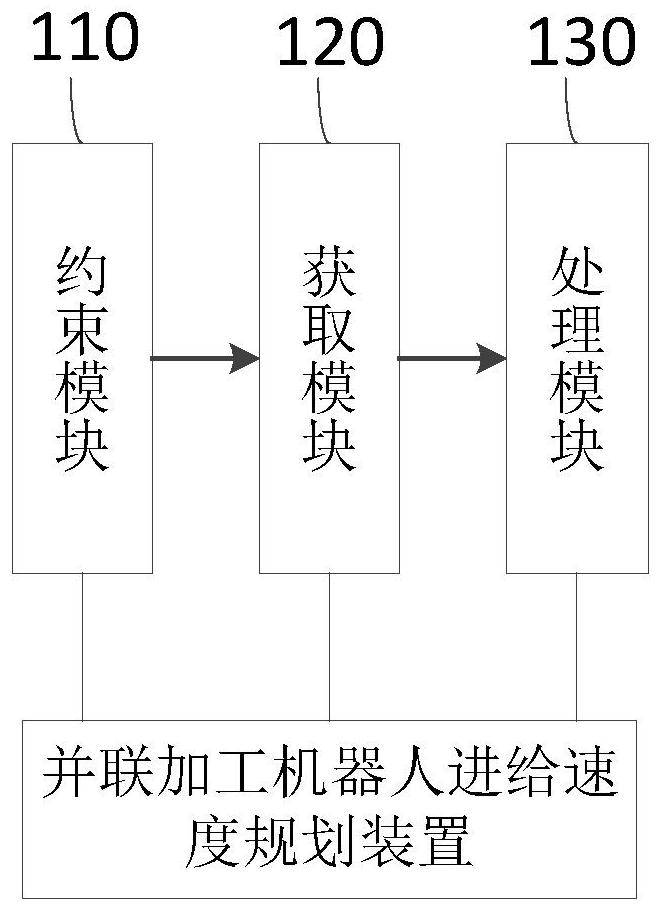
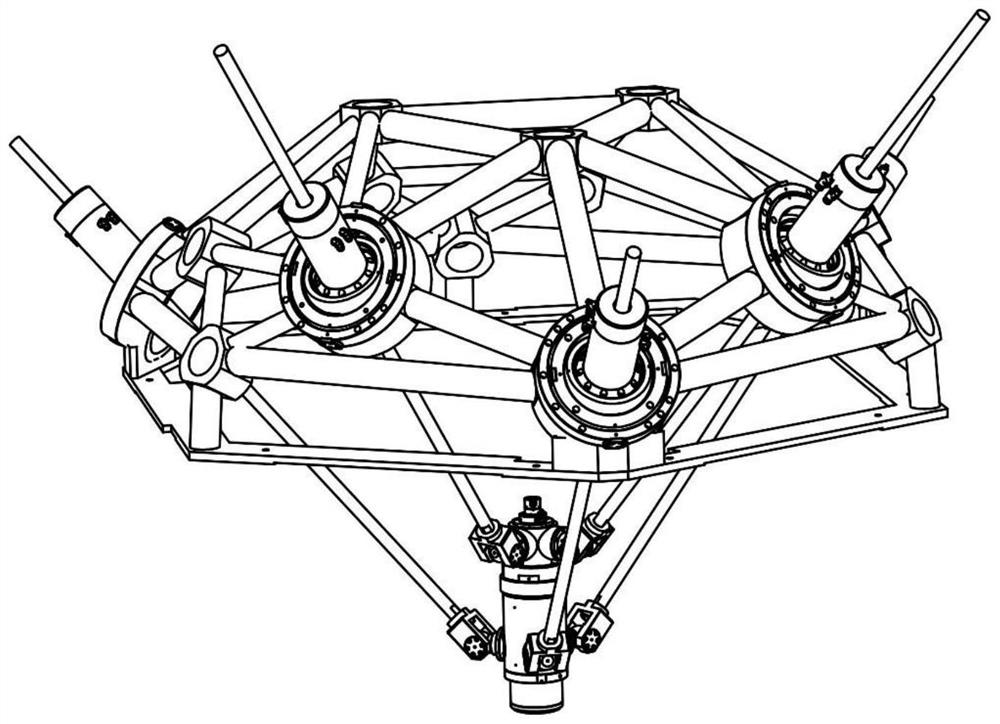
[0050] The invention provides a method and device for planning the feed speed of a parallel processing robot. With the rapid development of science and technology, the design of parts is becoming more and more advanced and the complexity is increasing. Typical complex parts such as turbine blades, automotive box parts, aerospace structural parts, etc. Such parts usually ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More