

Unmanned aerial vehicle landing control method and device, storage medium and electronic equipment
A control method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, height or depth control, control/adjustment system, etc., can solve the problem of low take-off and landing efficiency of unmanned aerial vehicles, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
[0059] Before introducing the UAV landing control method of the present disclosure, the application scenario of the present disclosure will be introduced first. Various embodiments provided in the present disclosure can be applied to a landing control scenario of a drone, where, for example, the drone can be a drone that performs tasks such as logistics delivery and takeaway delivery.
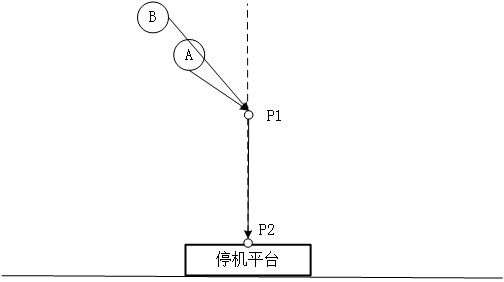
[0060] In related scenarios, when the drone is performing a flight mission, multiple drones may need to take off and land from the same parking platform. For example, refer to figure 1 A schematic diagram of a UAV landing scenario is shown, UAV A and UAV B may need to take o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More