

Position control method and device for robot and other elevators and storage medium
A control method and robot technology, applied in the field of robotics, can solve problems such as hindering pedestrians from getting on and off the elevator and affecting the experience of pedestrians getting on and off the elevator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
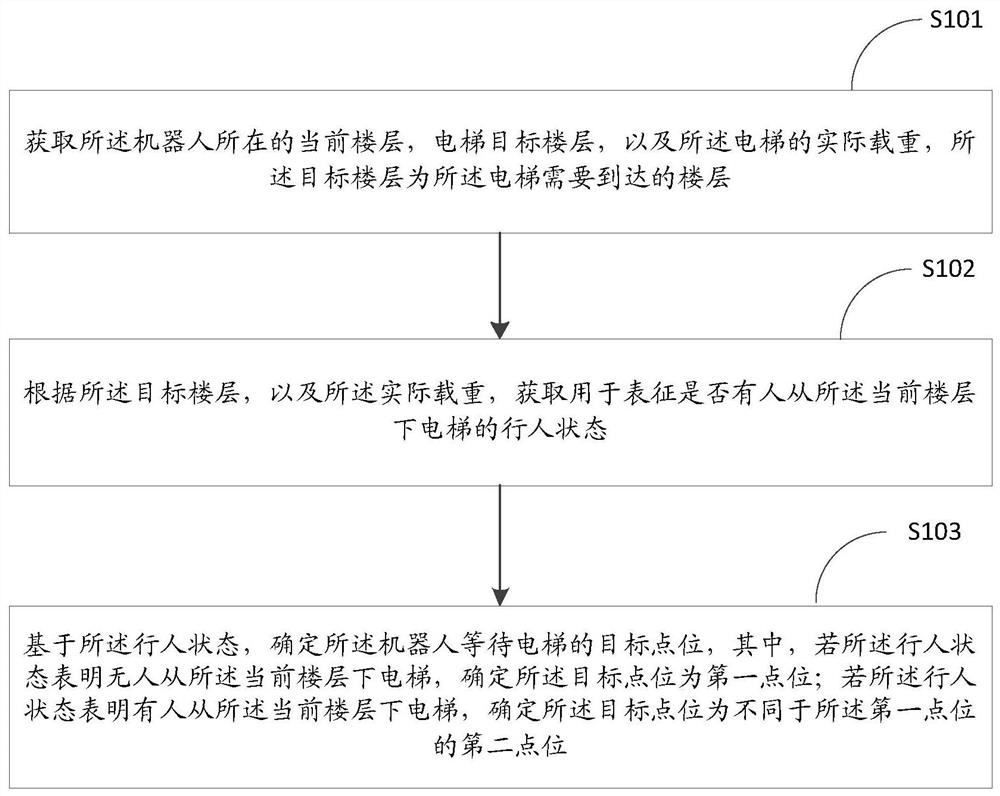
[0059] The embodiment of the present application provides a position control method of elevators such as robots, such as figure 1 As shown, it is a flow chart of the position control method for elevators such as robots provided by the embodiment of this specification. The method specifically includes:
[0060] Step S101: Obtain the current floor where the robot is located, the target floor of the elevator, and the actual load of the elevator, where the target floor is the floor that the elevator needs to reach;
[0061] Step S102: According to the target floor and the actual load, obtain the pedestrian status used to indicate whether someone gets off the elevator from the current floor;
[0062] Step S103: Based on the state of the pedestrian, determine the target point where the robot is waiting for the elevator, wherein if the state of the pedestrian indicates that no one gets off the elevator from the current floor, determine the target point as the first point; If the ped...
Embodiment 2
[0095] Based on the same inventive concept, the embodiment of this specification provides a position control device 200 for elevators such as robots, such as Figure 4 shown, including:
[0096] The elevator situation obtaining unit 201 is used to obtain the current floor where the robot is located, the elevator target floor, and the actual load of the elevator, and the target floor is the floor that the elevator needs to reach;
[0097] A pedestrian judging unit 202, configured to acquire a pedestrian state indicating whether someone gets off the elevator from the current floor according to the target floor and the actual load;
[0098] The point determination unit 203 is configured to determine the target point where the robot waits for the elevator based on the state of the pedestrian, wherein, if the state of the pedestrian indicates that no one gets off the elevator from the current floor, determine that the target point is The first point; if the pedestrian state indica...
Embodiment 3
[0114] Based on the same inventive concept as the position control method for elevators such as robots in the foregoing embodiments, this embodiment of the specification also provides a server, such as Figure 5 shown, including:
[0115] The memory 304, the processor 302, and the computer program stored in the memory 304 and operable on the processor 302, when the processor 302 executes the program, realizes the steps of the method for controlling the position of an elevator such as a robot mentioned above.
[0116] Among them, in Figure 5 In, bus architecture (represented by bus 300), bus 300 may include any number of interconnected buses and bridges, bus 300 will include one or more processors represented by processor 302 and various types of memory represented by memory 304 circuits linked together. The bus 300 may also link together various other circuits, such as peripherals, voltage regulators, and power management circuits, etc., which are well known in the art and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More