Touch device and adjusting method thereof
A touch and push rod technology, which is applied in transportation and packaging, contact operation parts, remote control aircraft, etc., can solve problems such as button damage, difficulty in controlling the force of pressing the button device, and abnormal operation of the button, so as to improve reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
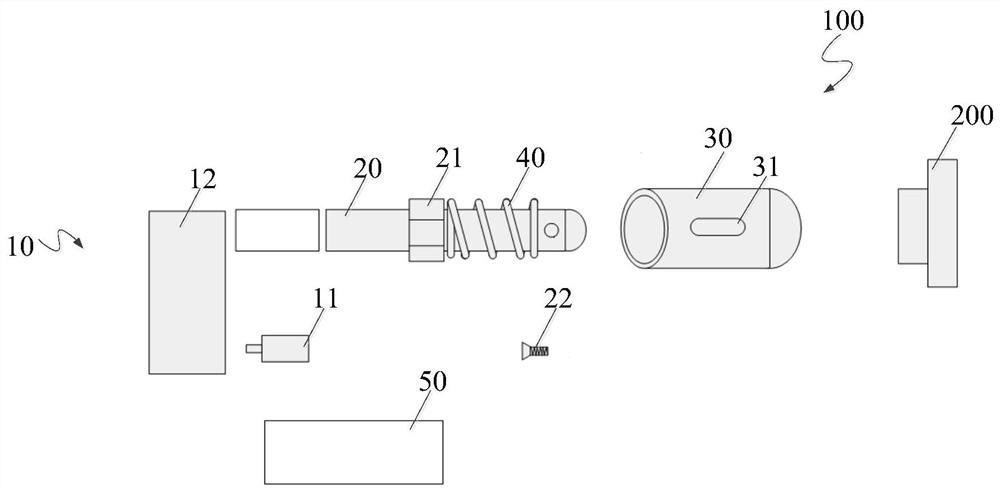
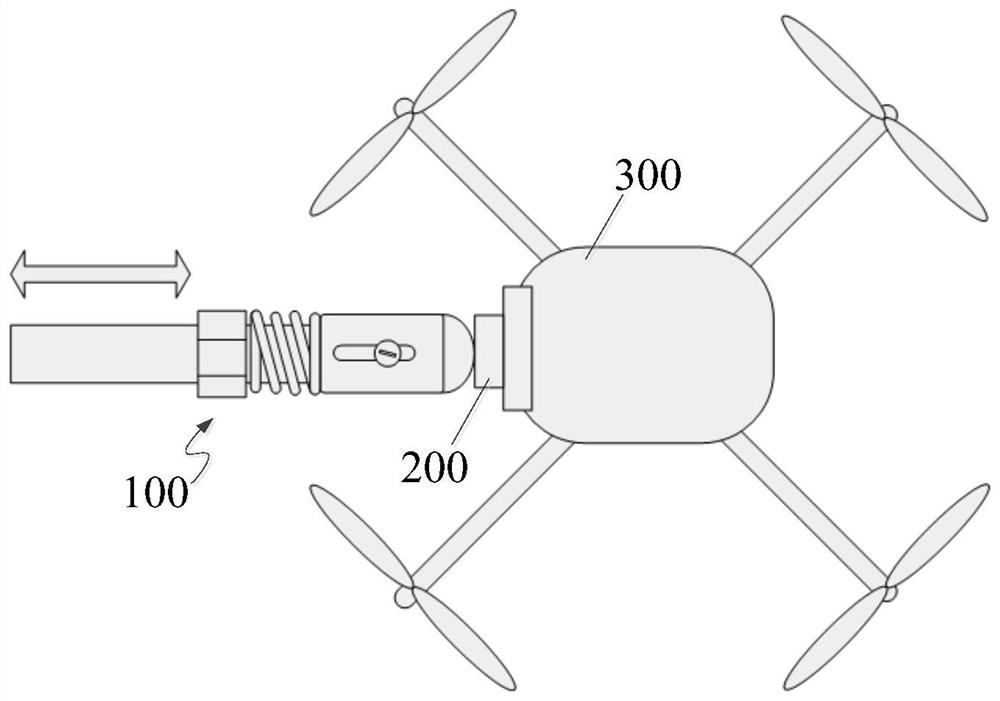
[0031] reference figure 1 , 2 The structure of the touch device 100 shown and the application scenario, the embodiment of the present invention provides a touch apparatus 100, which comprises: a power source 10 that provides power for touch device 100.
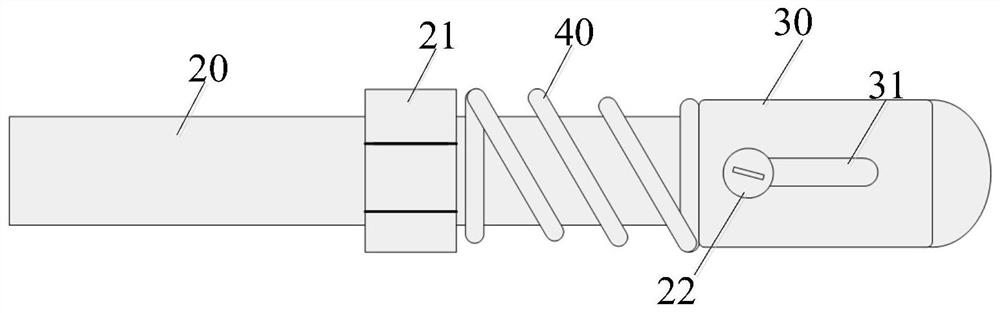
[0032] The touch device 100 also includes a push rod 20, and the power source 10 is connected to the first end of the push rod 20, and the drive push rod 20 is reciprocated. Alternatively, the push rod 20 is a straight rod, and the power source 10 drives the push rod 20 to reciprocate in its rod extension direction, specifically, the push rod 20 moves in the direction of the button device 200 and the remote button device 200.
[0033] The touch device 100 also includes a pressing cap 30 that is set to the second end of the push rod 20 in the pressing cap 30, and the top of the compression cap 30 is used to press the button apparatus 200, and the cap body is pressed on the cap 30. 31. Pressing the cap 30 for contact with the button ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



