

An Adaptive Horizontal Attitude Measurement Method Based on Motion State Monitoring
A technology of horizontal attitude and motion state, which is applied in measuring devices, navigation through speed/acceleration measurement, surveying and navigation, etc., can solve the problems of not considering carrier angle interference, insufficient complex environment, etc., and achieve low impact and high attitude measurement The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
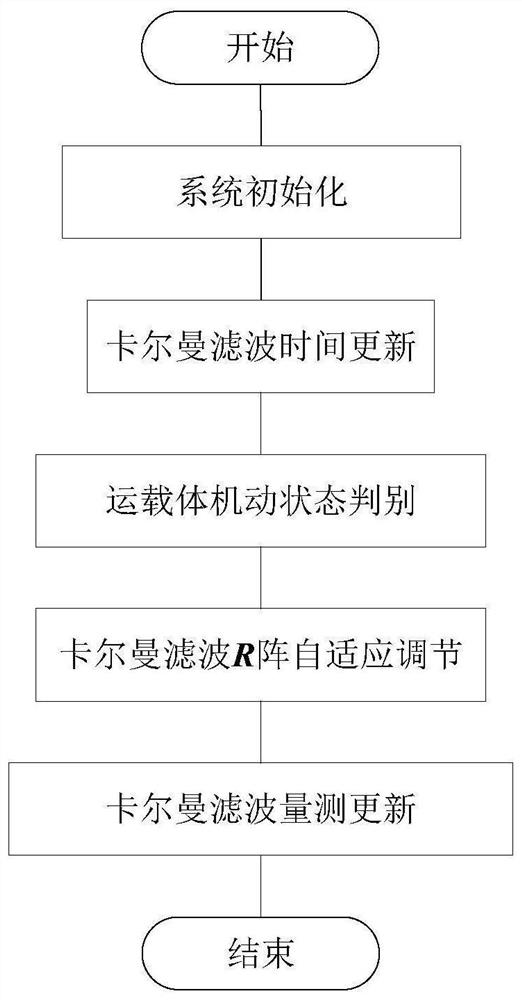
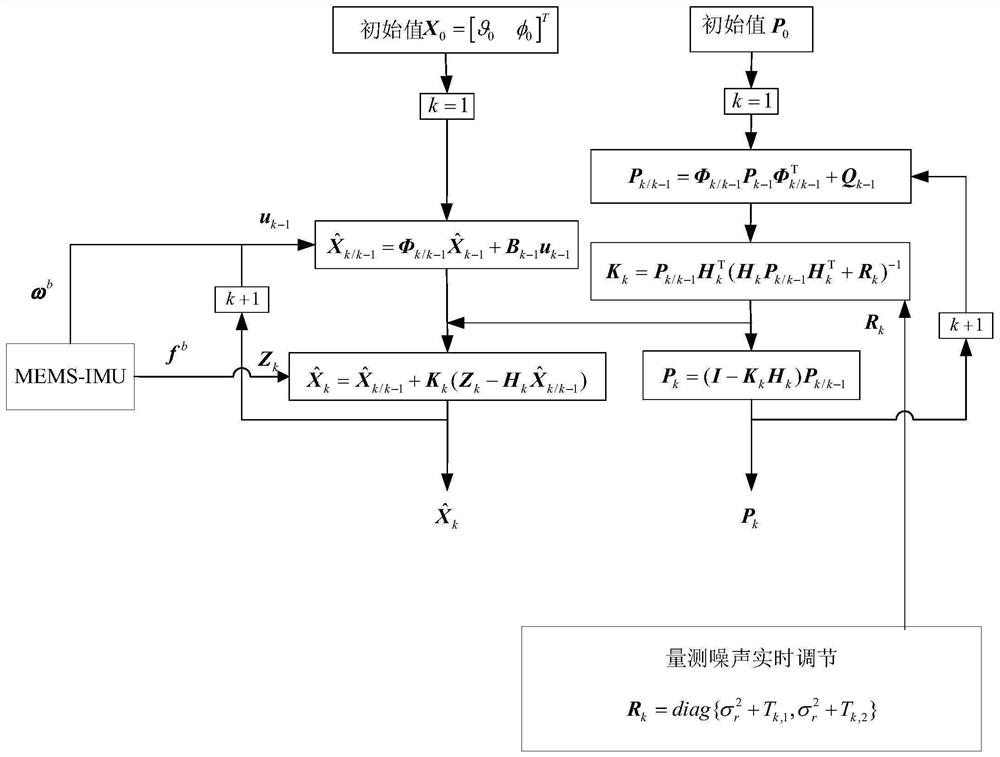
[0052] combine figure 1 and figure 2 , the specific embodiment of the present invention comprises the following steps:
[0053] Step 1. Fully preheat the inertial measurement element of the strapdown inertial navigation system;
[0054] Step 2. Collect the data of the MEMS-IMU in a static state for a period of time, consider the average output value of the MEMS-IMU in this period of time to be the random constant zero bias of the device, and correct the constant zero bias error of the gyroscope and accelerometer Compensation, the specific force f after the compensation constant zero bias error is obtained b and angular velocity ω b ;
[0055] Step 3. Perform initial alignment on the strapdown inertial navigation system to obtain the initial horizontal attitude angle (roll angle) of the carrier system (b system) relative to the navigation coordinate system (n system, the navigation coordinate system in the present invention selects the geographic coordinate system). θ 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More