

Motion capture system based on real bird flight and control method thereof
A technology of motion capture and control methods, applied in the field of motion capture, can solve the problems of large sensor size, heavy weight, and the inability of birds to fly, and achieve the effect of small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the said scope.
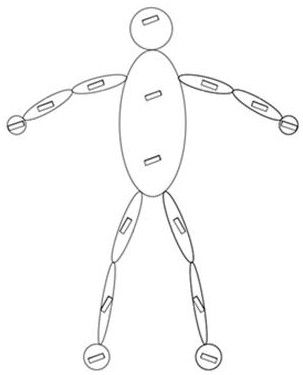
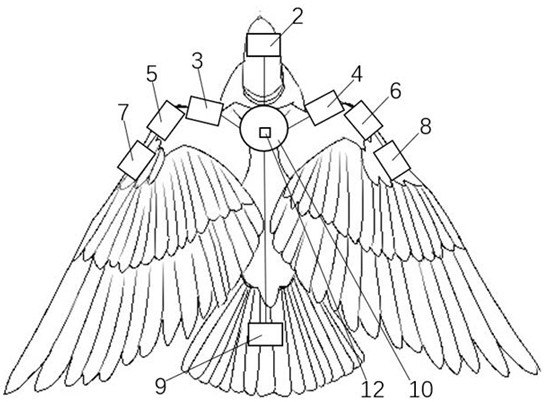
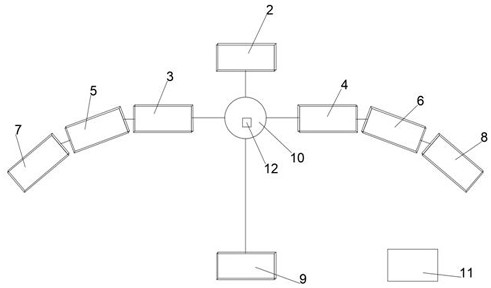
[0036] Such as Figure 2-7 As shown, a motion capture system based on the flight of a real bird includes a bird to be observed 1, a head sensor 2, a first humerus sensor 3, a second humerus sensor 4, a first ulna radius sensor 5, and a second ulna radius sensor 6. The first metacarpal sensor 7, the second metacarpal sensor 8, the coccyx sensor 9, the communication equipment 10 and the ground base station 11, the head sensor 2, the first humerus sensor 3, the second humerus sensor 4, the first ulna radius sensor 5, The second ulna radius sensor 6, the first metacarpal bone sensor 7, the second metacarpal bone sensor 8 and the coccyx sensor 9 are respectively fixed on the head, the first humerus, the second humerus, the first ulna radius, and the second ulna of the bird 1 to be observed. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More