

Curve vehicle speed control method and device, equipment and medium
A vehicle speed control and curve technology, which is applied in the field of curve speed control methods, equipment and media, and devices, and can solve problems such as danger, vehicles entering a U-turn section, and failure to slow down in time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
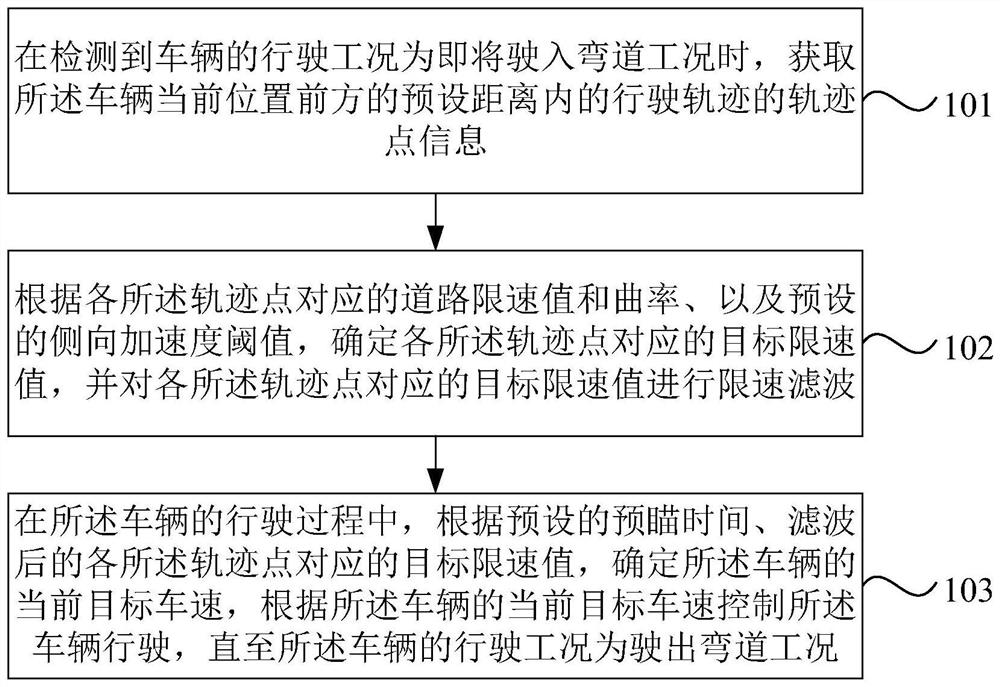
[0030] Figure 1A It is a flow chart of a curve speed control method provided by Embodiment 1 of the present invention. The embodiments of the present invention are applicable to the situation of controlling the operation of the automatic driving vehicle when the automatic driving vehicle is about to enter a curve. The method can be executed by the curve speed control device provided by the embodiment of the present invention. The device can be implemented in the form of software and / or hardware, and can generally be integrated into computer equipment. For example, the computer device may be a controller provided in an autonomous vehicle. Such as Figure 1A As shown, the method of the embodiment of the present invention specifically includes:
[0031] Step 101 , when it is detected that the driving condition of the vehicle is about to enter a curve, acquiring track point information of a driving track within a preset distance ahead of the vehicle's current position.
[0032]...
Embodiment 2
[0078] figure 2 It is a flow chart of a curve speed control method provided by Embodiment 2 of the present invention. The embodiments of the present invention may be combined with various optional solutions in the foregoing one or more embodiments. Such as figure 2 As shown, the method of the embodiment of the present invention specifically includes:
[0079] Step 201 , when it is detected that the driving condition of the vehicle is about to enter a curve, acquire track point information of the driving track within a preset distance ahead of the current position of the vehicle from the high-precision map.
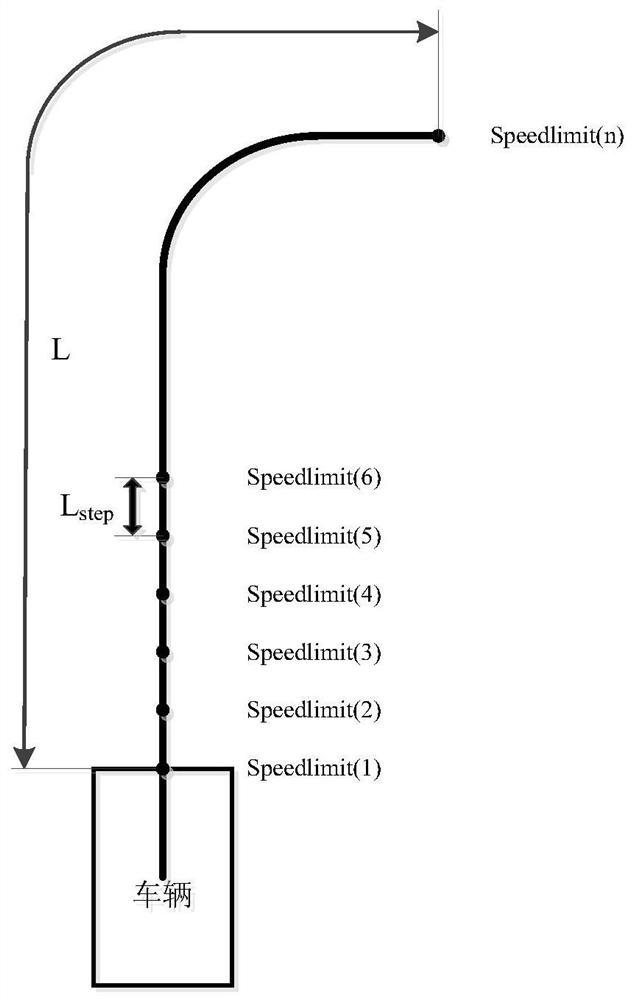
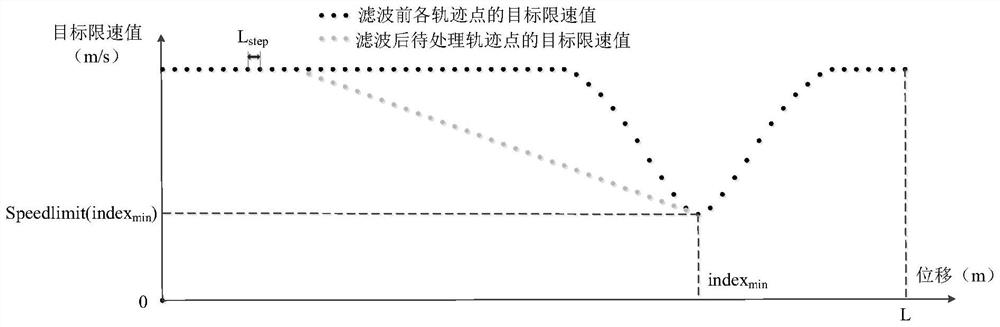
[0080] Wherein, the driving trajectory within a preset distance ahead of the current vehicle position is a driving trajectory sequence composed of a plurality of trajectory points, and the trajectory point information includes the road speed limit value and curvature corresponding to each trajectory point.
[0081]Step 202: Determine the curvature speed limit value co...
Embodiment 3
[0087] image 3 It is a schematic structural diagram of a curve vehicle speed control device provided by Embodiment 3 of the present invention. The device can be configured in a controller of an adaptive cruise control system, such as image 3 As shown, the device includes: an information acquisition module 301 , a speed limit value determination module 302 and a vehicle control module 303 .
[0088] Wherein, the information acquisition module 301 is used to acquire the track point information of the driving track within the preset distance in front of the current position of the vehicle when it is detected that the driving condition of the vehicle is about to enter a curve; wherein, the The driving track within the preset distance ahead of the current position of the vehicle is a running track sequence composed of a plurality of track points, and the track point information includes the road speed limit value and curvature corresponding to each track point; the speed limit v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More