

Self-adaptive space manipulator suitable for capturing various non-cooperative satellites
A self-adaptive, manipulator technology, applied in aerospace equipment, transportation and packaging, photovoltaic power generation, etc., can solve the problem of not being able to adapt to a variety of star and arrow docking rings to capture, etc., to improve the connection stiffness, increase the contact area, improve the The effect of reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical scheme of the present invention will be further described below in conjunction with the accompanying drawings and through specific embodiments:
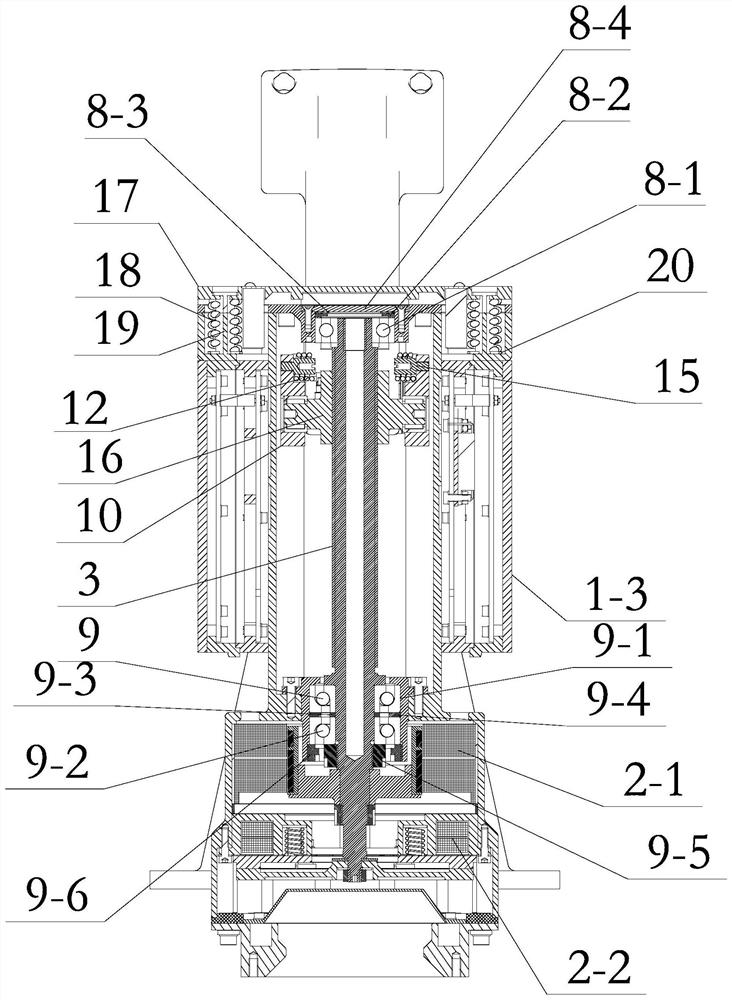
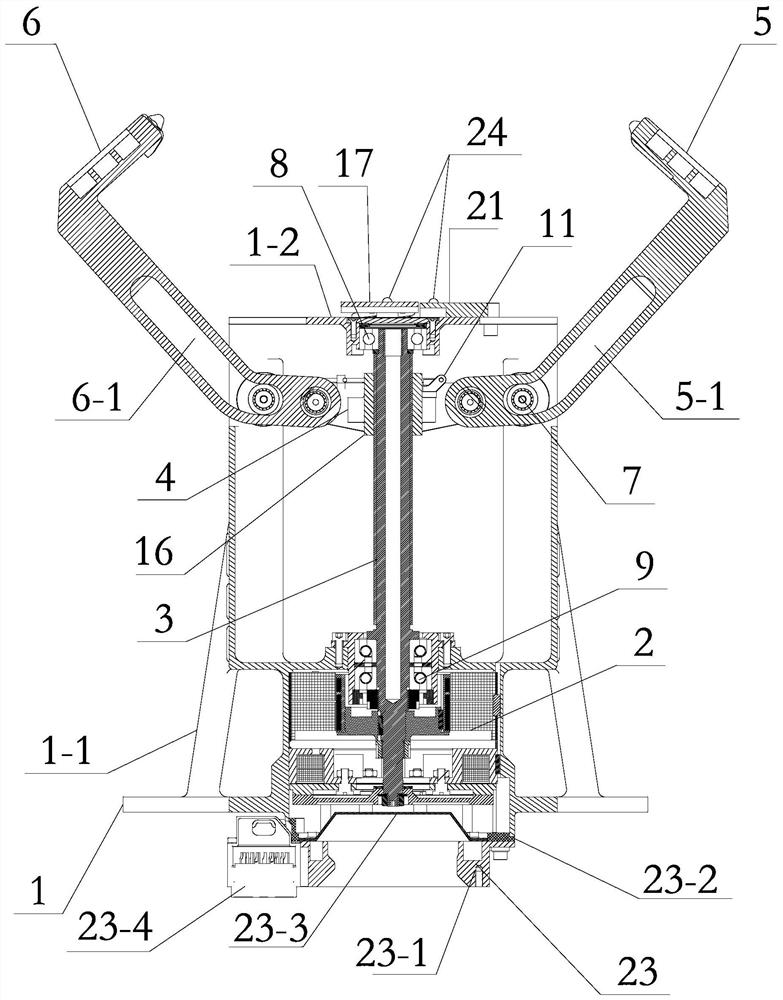
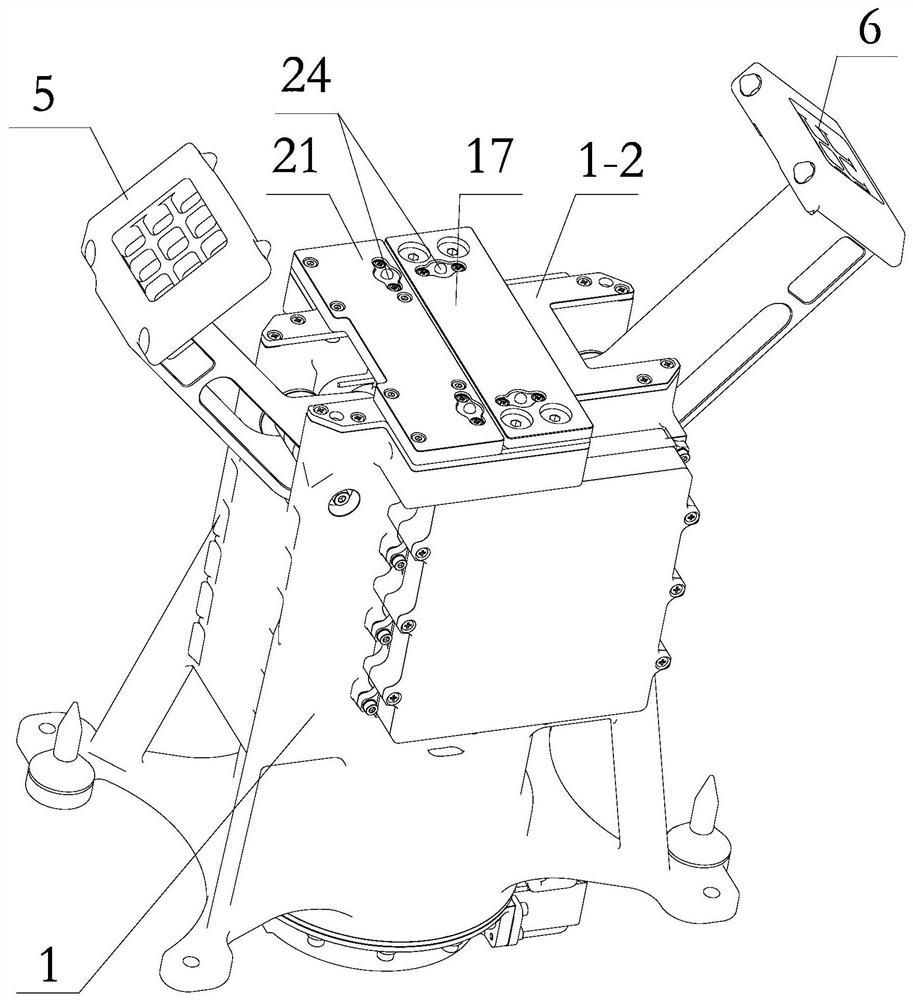
[0027] like figure 1 , figure 2 and image 3 As shown, the adaptive space manipulator suitable for capture by various non-cooperative satellites includes a fixed support housing 1, a drive mechanism 2, a ball screw shaft 3, a screw nut 16, an inner capture finger 5, and an outer capture finger 6 , two guide mechanisms 7, deep groove ball bearing assembly 8, angular contact ball bearing assembly 9, swing mechanism, adaptive support mechanism and quick change interface assembly 23, the fixed support shell 1 includes support shell 1-1 and The upper cover 1-2, the upper cover 1-2 is fixed on the upper port of the supporting shell 1-1, the deep groove ball bearing assembly 8 is fixed on the lower surface of the upper cover 1-2, The drive mechanism 2 is fixed on the lower end of the support shell 1-1, the ball scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More