

Slip monitoring method and device of mobile robot and mobile robot
A mobile robot and controller technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as excessive control, noise interference, and incapable mobile robot slip control, so as to improve accuracy and rationality, and improve operating efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present application will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are part of the embodiments of the present application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
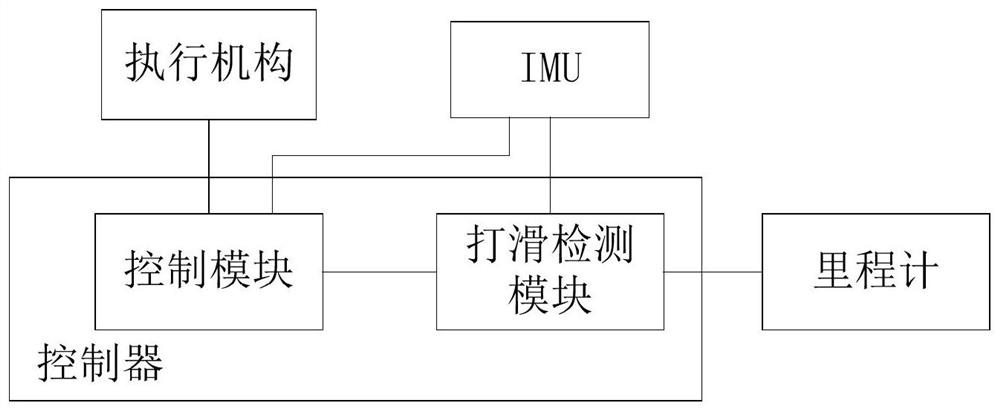
[0037] In the practical application of mobile robots, not all abnormal situations need to use slip control. When the control ability of the controller of the mobile robot is strong, the controller may repair itself and normally control the mobile robot to continue to run. Based on Therefore, the embodiment of the present application provides a slip monitoring method and device for a mobile robot, and the mobile robot. Through the slip control method provided in the embodiment of the present application, the slip control accurac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More