Bee colony collision avoidance control method based on elastic force field
A control method and elastic mechanics technology, applied in special data processing applications, complex mathematical operations, geometric CAD, etc., can solve problems such as global runaway, and achieve the effect of accelerating the solution rate, good local distribution feature control, and good collision avoidance effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0066] combine figure 1 , the swarm avoidance control method based on elastic force field of the present invention comprises the following steps:
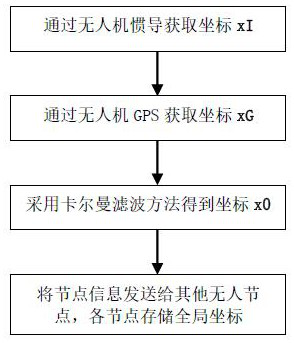
[0067] Step 1. UAV formation acquires and shares spatial coordinate information. combine figure 2 , the specific steps are:
[0068] First, based on the UAV node's own inertial navigation / GPS navigation data, the spatial coordinates of the UAV node are obtained by using the Kalman filter method :
[0069] Second, the unmanned node sends its own space coordinate information Sent to the remaining nodes of the unmanned formation for storage, and each unmanned node stores the global coordinate information .
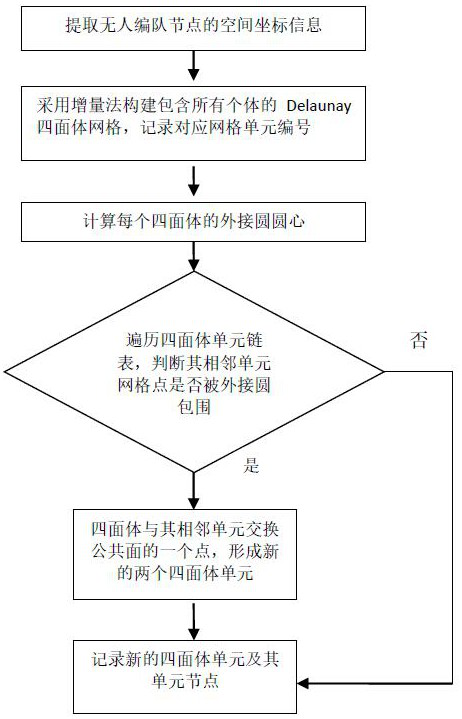
[0070] Step 2. Construct the unmanned formation grid based on the Delaunay graph method. combine image 3 , the specific steps are:
[0071] First, extract the spatial coordinate information of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com