

Path following control method, device and storage medium adapting to unknown dynamic space
A technology of following control and path, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of increasing the difficulty of path planning, destroying the optimality of the path, and reducing the search efficiency. and other issues to ensure the vehicle control ability and effect, high planning efficiency, and strong path realization ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
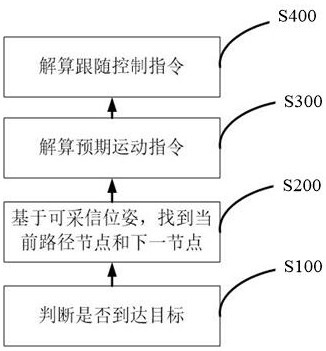
[0043] The path following control method of the embodiment of the present application mainly includes the steps:
[0044] (1) Determine whether the vehicle has reached the target, stop if it does, and continue if it does not. Set the reaching target judgment threshold d_end, if the current admissible pose distance from the end node of the rough path node string is less than the threshold, the target is considered to be reached; otherwise, it is considered that the target has not been reached. The end node is also the target point of path planning.
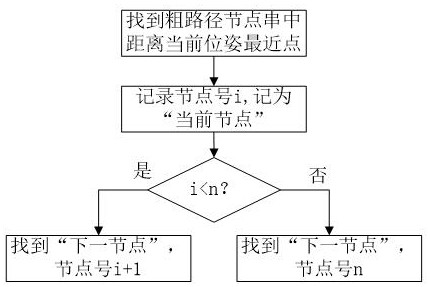
[0045] (2) Based on the admissible pose, find the current node and the next node in the rough path node string. Among them, the admissible pose can be the result of certain operations after being directly acquired by various sensors, or it can be the comprehensive result obtained after pose fusion processing. The current node is the node closest to the admissible pose in the rough path node string. The next node in the rough pat...
Embodiment 2
[0060] combined with Figure 5 The above structural block diagram further describes the path following control device adapted to the unknown dynamic space according to the embodiment of the present application.
[0061] The path following control device of this example includes a judgment module, a node module, an expectation module, and a control module connected in sequence.
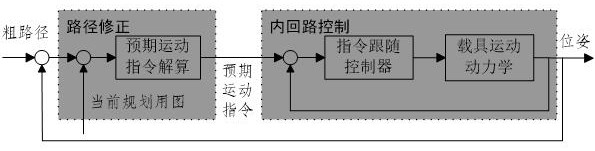
[0062] Specifically, the judging module judges whether the vehicle has reached the target: if it reaches it, it stops, and if it does not reach it, it continues to execute; when the judgment result of the judging module is that the target has not been reached, the node module is based on the acceptable pose and poses in the rough path node string. Find the current node and the next node; the expectation module uses the artificial potential field method to solve the expected motion command based on the acceptable pose and the current planning graph; the control module uses the expected motion command to...
Embodiment 3
[0067] This example provides a computer-readable storage medium on which a computer program is stored, and when the computer program is run by a processor, the device where the storage medium is located is controlled to execute the path following control method adapted to the unknown dynamic space of the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More