

Collision avoidance control method for bee swarms based on elastic force field
A control method and elastic mechanics technology, applied in complex mathematical operations, geometric CAD, design optimization/simulation, etc., can solve problems such as global out-of-control, and achieve the effects of accelerated solution speed, good local distribution feature control, and good collision avoidance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0066] combine figure 1 , the swarm avoidance control method based on elastic force field of the present invention comprises the following steps:
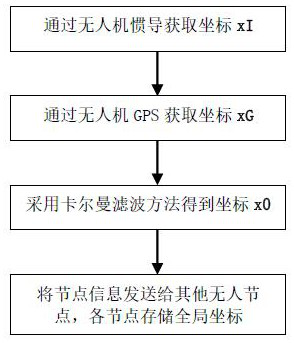
[0067] Step 1. UAV formation acquires and shares spatial coordinate information. combine figure 2 , the specific steps are:
[0068] First, based on the UAV node's own inertial navigation / GPS navigation data, the spatial coordinates of the UAV node are obtained by using the Kalman filter method :
[0069] Second, the unmanned node sends its own space coordinate information Sent to the remaining nodes of the unmanned formation for storage, and each unmanned node stores the global coordinate information .
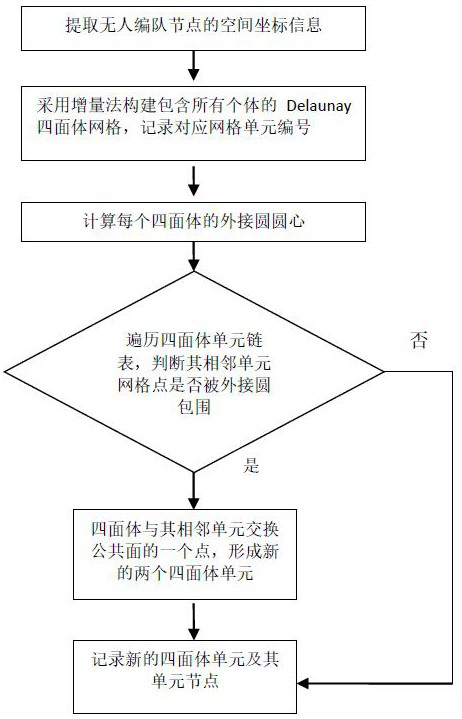
[0070] Step 2. Construct the unmanned formation grid based on the Delaunay graph method. combine image 3 , the specific steps are:
[0071] First, extract the spatial coordinate information of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More