

Real-time self-generating pose calculation method based on variance component estimation theory
A technology of variance component estimation and calculation method, which is applied in calculation, navigation calculation tools, computer parts and other directions, and can solve problems such as difficulty in ensuring precise solution of pose information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
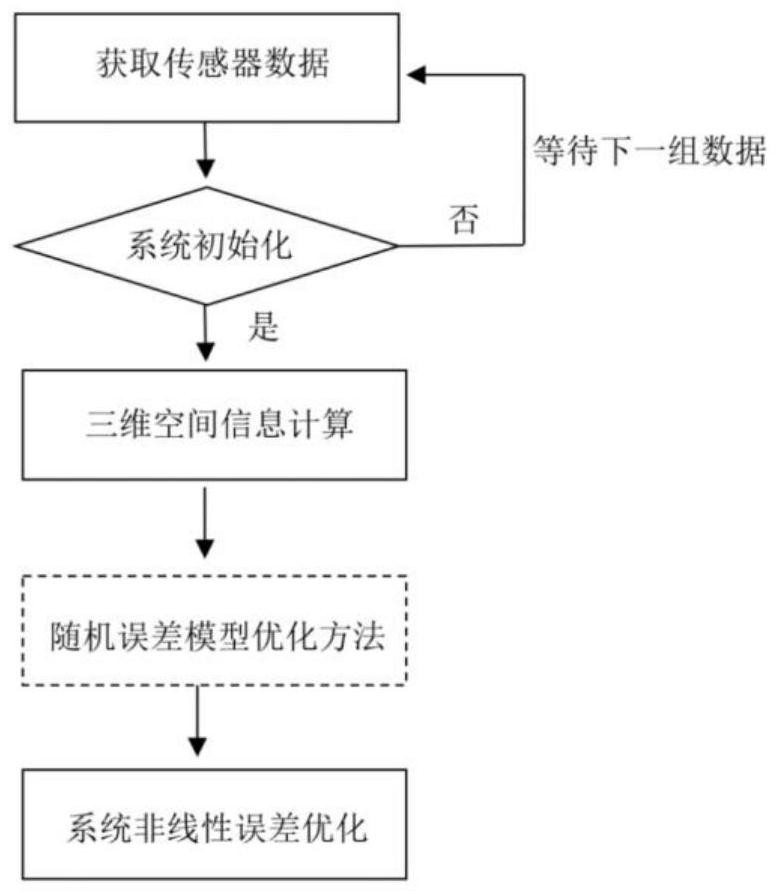
[0073] The following is a detailed description of the visual navigation algorithm based on variance component estimation in the present invention:
[0074] Step 1: Use the visual sensor to obtain image measurement information in real time and complete the system initialization; the binocular stereo camera is constructed according to feature point extraction, left and right camera image feature point matching, and unit origin position information to realize system initialization.
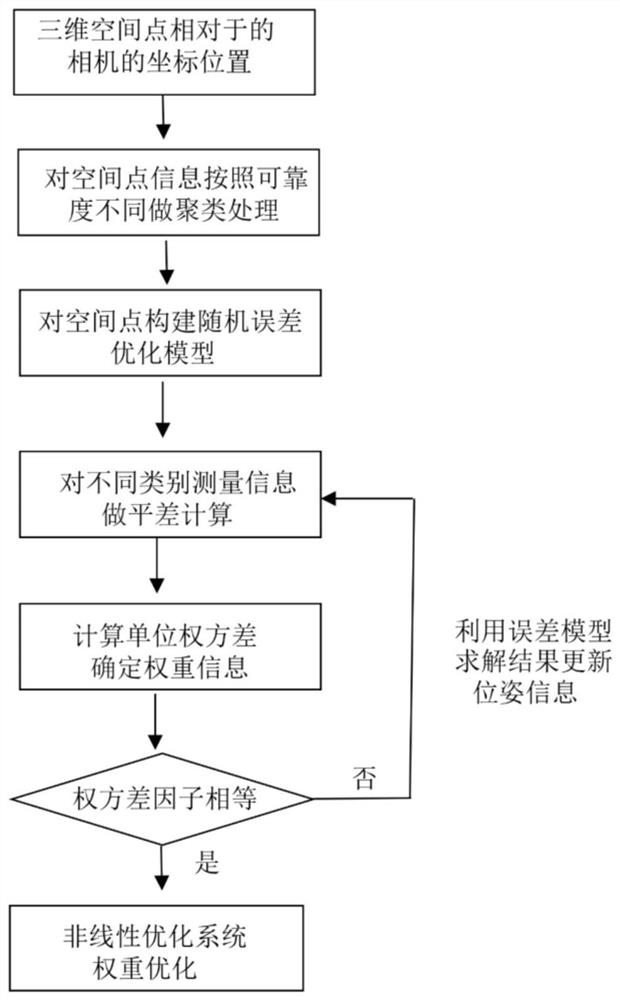
[0075] Step 2: After the initialization is completed, use the measurement information to calculate the coordinates of the three-dimensional space points.
[0076] Step 2.1: In the process of using the visual sensor to calculate the pose, directly use the baseline information of the camera to calculate the spatial coordinates of the binocular measurement information, and the calculation method is as follows:
[0077]
[0078] Among them, f is the focal length of the camera, b is the baseline size o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More