Docking method based on multi-sensor equipment
A multi-sensor, docking direction technology, used in instruments, non-electric variable control, two-dimensional position/channel control and other directions, can solve problems such as low efficiency, reduced positioning accuracy, and data instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
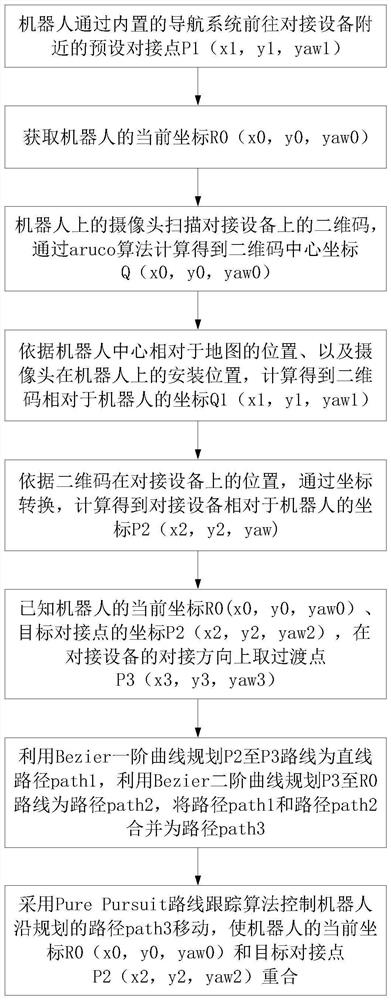
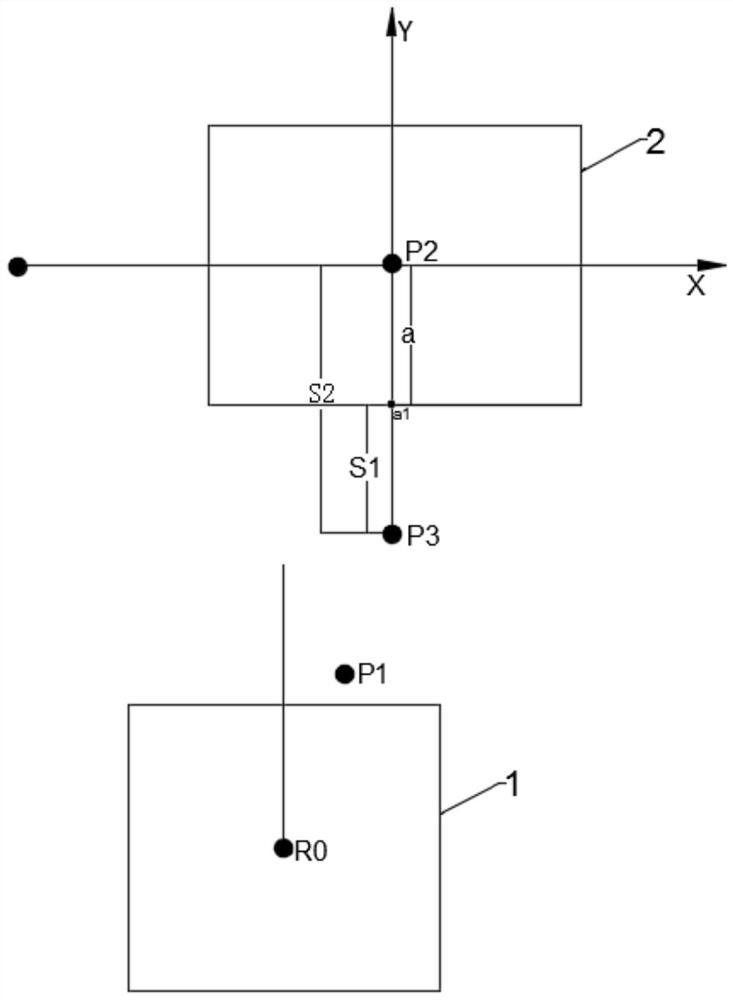
[0030] refer to figure 1 , the present invention is based on a multi-sensor device docking method, comprising the following steps:
[0031] S1. The robot goes to the preset docking point P1 (x1, y1, yaw1) near the docking device through the built-in navigation system, and P1 (x1, y1, yaw1) is the coordinate relative to the origin of the map.
[0032] S2. Obtain the current coordinates R0 (x0, y0, yaw0) of the robot, where R0 (x0, y0, yaw0) is the coordinates relative to the origin of the map.
[0033] S3. The camera on the robot scans the QR code on the docking device, and calculates the center coordinate Q(x0, y0, yaw0) of the QR code through the aruco algorithm.
[0034] S4. According to the position of the center of the robot relative to the map and the installation position of the camera on the robot, calculate the coordinates Q1 (x1, y1, yaw1) of the two-dimensional code relative to the robot.
[0035] S5. According to the position of the QR code on the docking device, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More