

LMI-based bionic flapping-wing aircraft H-infinity robust control method and system
A flapping-wing aircraft and robust control technology, applied in the field of bionic flapping-wing aircraft, can solve problems such as poor control accuracy, body differences, and enhanced model uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0084] Aiming at the problem that the bionic flapping-wing aircraft has poor longitudinal stability and is easily affected by disturbances, the present invention aims at quantitatively describing the noise, disturbance and the uncertainty of the actuator for the aircraft model with uncertain parameters and external disturbances, and designs a bionic flapping-wing aircraft based on LMI. The H∞ robust control of wing aircraft, the final control system can eliminate the following error and resist the influence of disturbance and noise.
[0085] According to a kind of LMI-based bionic flapping-wing aircraft H∞ robust control method provided by the present invention, comprising:
[0086] Step S1: Establish a time-varying longitudinal dynamics model of the bionic flapping-wing aircraft;
[0087] Step S2: Periodically average the aerodynamic forces and moments of the bionic flapping-wing aircraft to obtain a longitudinal steady model of the nonlinear bionic flapping-wing aircraft;
...
Embodiment 2
[0172] Embodiment 2 is a preferred example of embodiment 1
[0173] According to the LMI-based bionic flapping wing aircraft H∞ robust control method provided by the present invention, such as Figures 1 to 6 shown, including:
[0174] A steady longitudinal linear model of the aircraft is obtained according to the average theory. Using the hovering steady-state equilibrium operating point of the aircraft to apply small disturbances to the system input variable parameters one by one, the form of the small disturbance equation is obtained as:
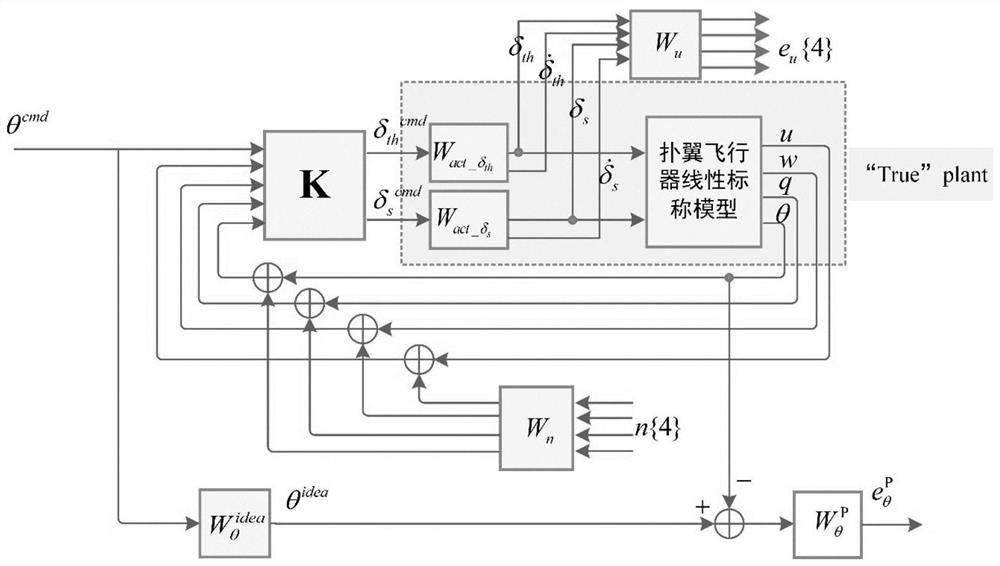
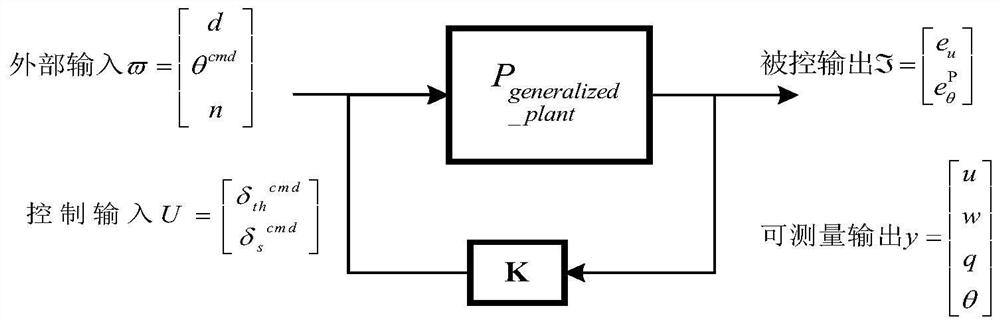
[0175] Neglecting the effect of rotational circulation during wing flapping, then is approximately equal to 0, the state transition equation of the longitudinal nominal model can be abbreviated as Where B is the control matrix, and the control amount is the deflection angle δ of the linear servo that controls the pitching motion s and throttle amount δ th . The measured quantity is [u w q θ] T , the output equation is where t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More