

A wheel-leg hybrid quadruped robot
A quadruped robot and wheel-legged technology, applied in the field of robotics, can solve the problems of robot stiffness, bearing capacity and motion flexibility constraints, and achieve the effect of solving energy supply and endurance problems, improving motion stability, and realizing power system guarantee.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
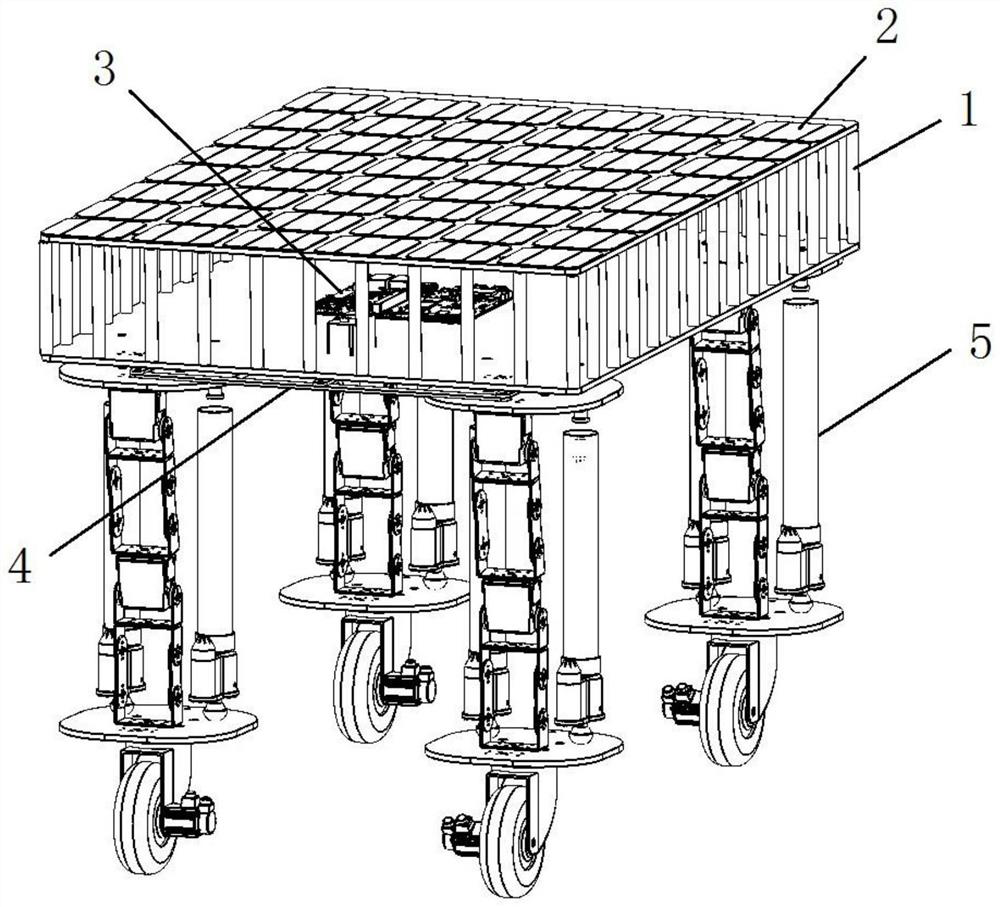
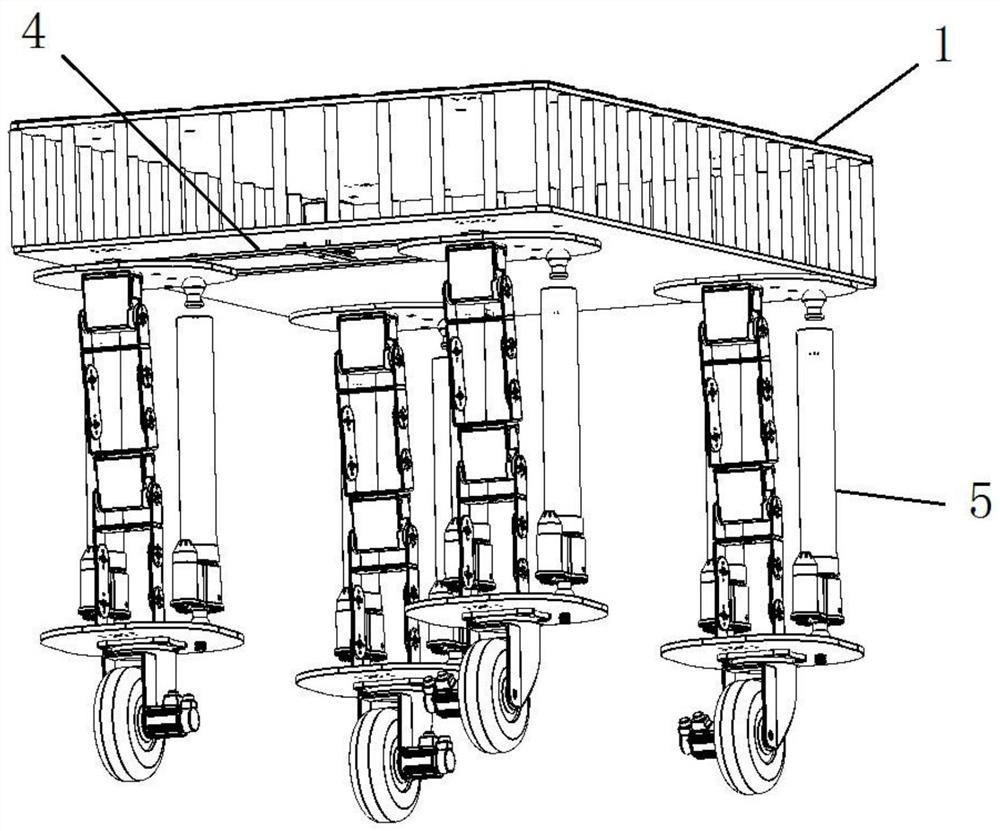
[0031] A wheel-legged hybrid quadruped robot, including mounting platform 1, steering mechanism 4 and 4 mechanical legs5;
[0032] The mechanical leg 5 comprises 2 front legs and 2 rear legs, 2 front legs are installed in the front of the lower end of the mounting platform 1 through the steering mechanism 4;
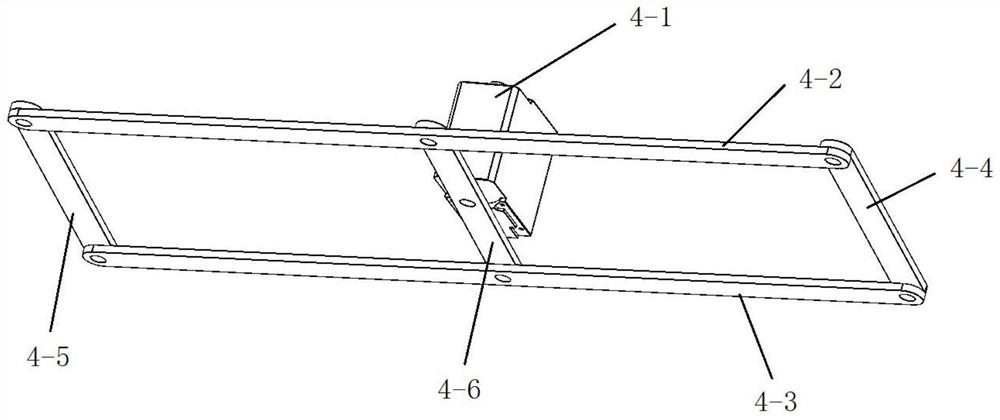
[0033] The steering mechanism 4 includes a steering steering steering gear 4-1 and a Japanese zigzag linkage mechanism, the Japanese zigzag linkage mechanism comprises a first long pole 4-2, a second long bar 4-3, a first short bar 4-4, a second short bar 4-5 and an intermediate bar 4-6, the first long pole 4-2 ends are hinged with the first short bar 4-4, the second short bar 4-5 phase articulation, in contrast, the second long pole 4-3 ends are hinged with the first short bar 4-4, the second short pole 4-5 phase articulation, The intermediate rod 4-6 at both ends are articulated at the midpoint of the first long rod 4-2, the second long rod 4-3, the steering steering servo...
Embodiment 2
[0040] On the basis of the above example 1, to meet the needs of work in the field, the solar panel is installed on the installation platform, the solar panel is connected to the host, to power it, improve the power supply and the use time.
Embodiment 3
[0042] On the basis of the above embodiments 1 or 2, a separate drive motor is provided next to each of the rollers, so that the apparatus has another mode of operation, that is, when the mechanical leg does not perform the action, the drive motor next to the roller can be driven directly alone to perform the rotation of the roller, so that the device relies on the rotation of the roller to travel.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More