

Full-automatic parking control method based on linear arc path and controller
A parking control, fully automatic technology, applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve problems such as steering unevenness and divergence, and achieve the effect of improving steering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
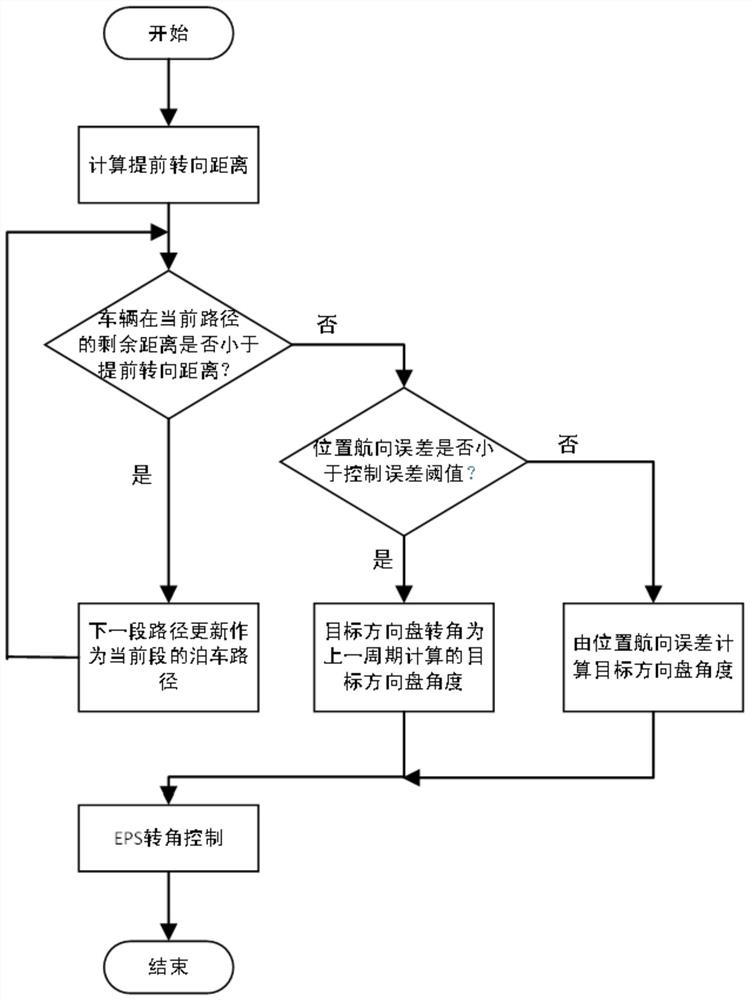
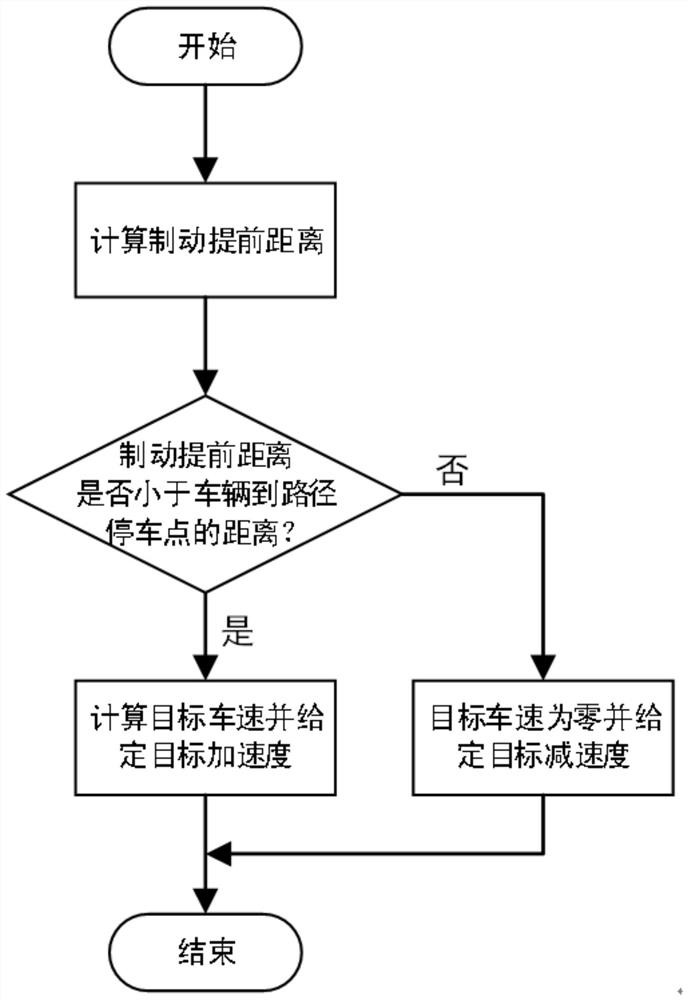
[0052] Such as figure 1 and figure 2 As shown, the fully automatic parking control method based on the straight line arc path of the present invention comprises the following steps:
[0053] Step S1: if figure 1 As shown in , according to the segmented parking route in the planned route information, the expected steering wheel angle and the steering distance in advance of the next segment of the parking route are determined;
[0054] Wherein, the entire parking path is segmented, and in the case of the same gear position, the trajectory with the same radius is one segment. In the state of initialization (that is, the vehicle has not started to drive), the next section of the parking path is the first section of the parking path. It should be noted that the expected steering wheel angle and the steering distance in advance of the next parking path do not need to be calculated repeatedly. It is only necessary to calculate the expected steering wheel angle and steering distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More