

Travel route generation device, travel route generation method, and vehicle control device
A technology for driving paths and generating devices, applied in control devices, vehicle components, transportation and packaging, etc., can solve problems such as the reduction of prediction accuracy, and achieve the effect of preventing the reduction of prediction accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
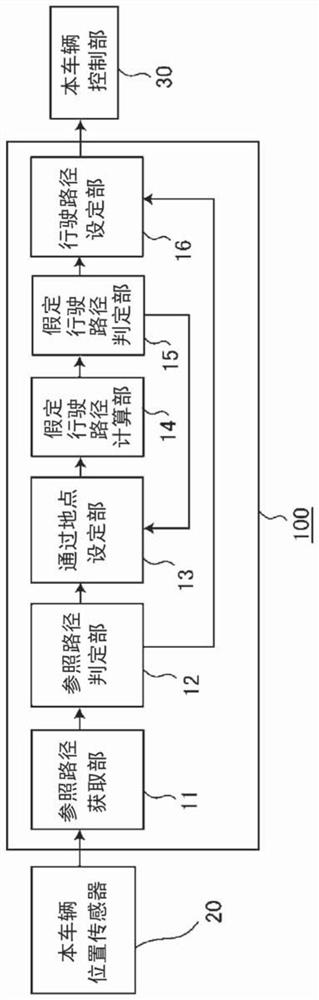
[0030] figure 1 It is a block diagram illustrating the configuration of the travel route generation device according to the first embodiment.
[0031] figure 1 Among them, the driving route generation device 100 acquires the position and orientation (direction) of the own vehicle from the own vehicle position sensor 20 (such as GPS and geomagnetic sensor) mounted on the own vehicle, and generates the driving route of the own vehicle by the following method. The generated data is output to the vehicle control unit 30 . Then, the host vehicle control unit 30 controls the host vehicle so as to travel on the travel route of the host vehicle generated by the travel route generation device 100 .
[0032] The travel route generation device 100 includes a reference route acquisition unit 11 , a reference route determination unit 12 , a passing point setting unit 13 , a provisional travel route calculation unit 14 , a provisional travel route determination unit 15 , and a travel rout...
Embodiment approach 2
[0056] Next, a travel route generation device according to Embodiment 2 will be described. Image 6 It is a block diagram illustrating the configuration of the travel route generation device according to the second embodiment.
[0057] figure 2 Herein, the travel route generation device 200 acquires the position and orientation (direction) of the host vehicle from the host vehicle position sensor 20 (for example, GPS and geomagnetic sensor) mounted on the host vehicle. In addition, the position and orientation (direction) of other vehicles existing around the own vehicle are acquired using the other vehicle position sensor 40 (for example, a millimeter-wave radar or a camera) mounted on the own vehicle with the own vehicle's position as the origin. Then, the travel route of the other vehicle is generated by the following method, and the generated data is output to the vehicle travel route calculation unit 50 . The own-vehicle travel route calculation unit 50 calculates the ...
Embodiment approach 3
[0084] Next, a travel route generation device according to Embodiment 3 will be described. Figure 8 It is a block diagram illustrating the configuration of the travel route generation device according to the third embodiment.
[0085] Figure 8 Among them, the travel route generation device 300 acquires the position and orientation (direction) of the host vehicle from the host vehicle position sensor 20 (for example, GPS and geomagnetic sensor) mounted on the host vehicle. In addition, the position and orientation (direction) of other vehicles existing around the own vehicle are acquired using the other vehicle position sensor 40 (for example, a millimeter-wave radar or a camera) mounted on the own vehicle with the own vehicle's position as the origin. Then, the traveling route of the host vehicle is generated by the following method, and the generated data is output to the host vehicle control unit 30 . Then, the host vehicle is controlled based on the travel route generat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More