

Multi-center unmanned aerial vehicle selection method for unmanned aerial vehicle distributed task planning
A mission planning and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of large amount of communication information, the amount of communication information or the exponential increase in the number of information interactions, and achieve the effect of reducing the amount of communication information and reducing the number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
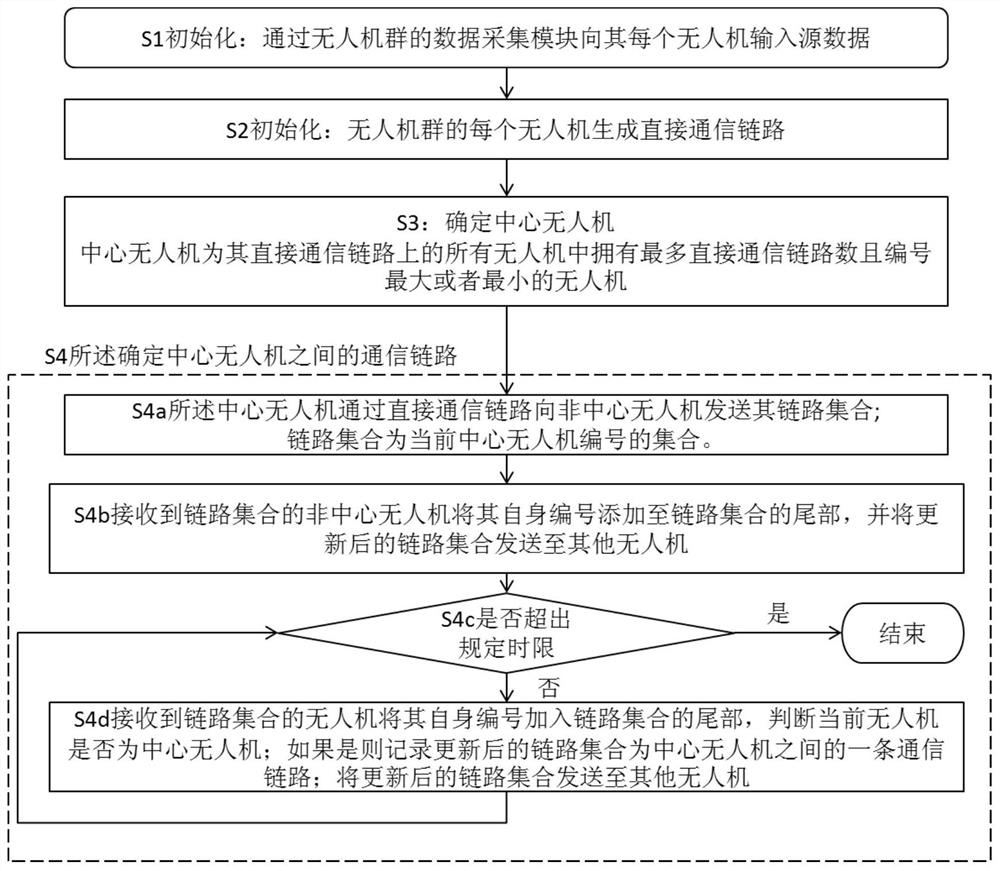
[0028] Such as figure 2 As shown, a multi-center UAV selection method for UAV distributed mission planning, including:
[0029] S1 initialization, input initial data to each UAV through the data acquisition module of the UAV group;
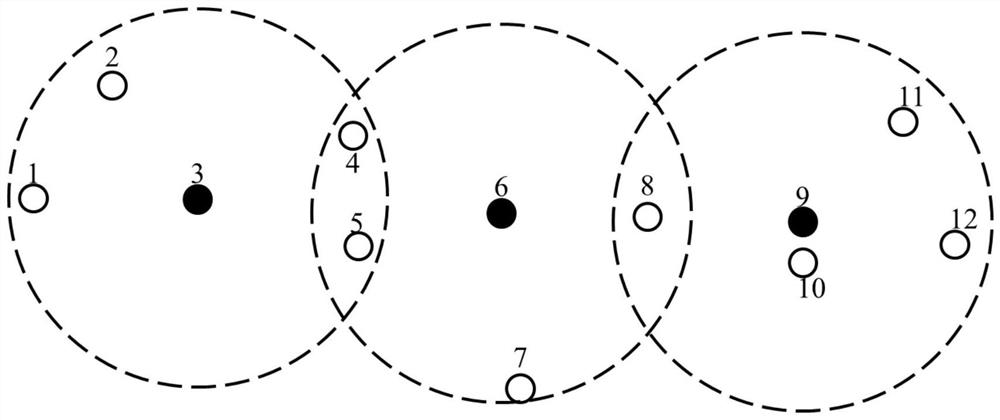
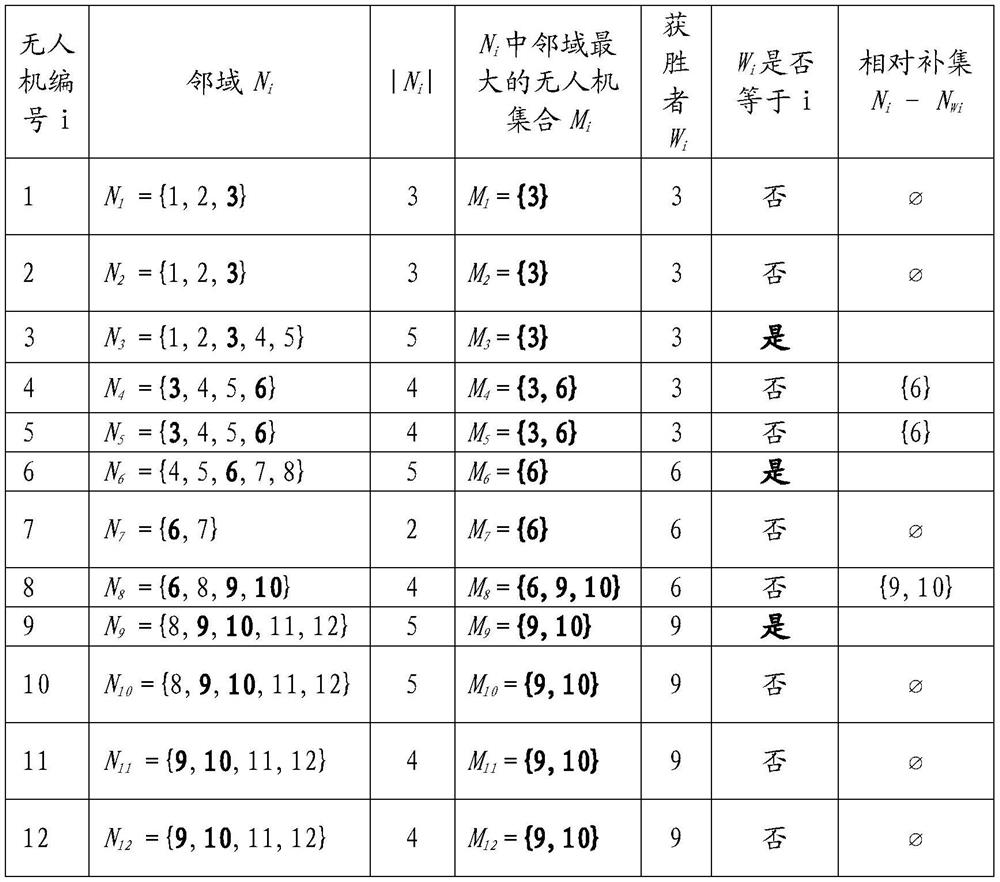
[0030] All drones need to have two-way communication function, broadcast communication function, have a certain computing power and can execute mission planning algorithm independently; all drones are numbered sequentially, and the drone numbered i represents the i-th drone; All drones carry synchronized clocks; drone i considers the winner of the central drone to be the variable W i , and initialized to i, ie itself;
[0031] S2. Each UAV generates a direct communication link:
[0032] S2a. At time t0, all drones broadcast status information to their surroundings within the agreed time;
[0033] S2b. At time t1, UAV i (taking all numbers) records the number of state information pieces received during S2a, and sorts out the number set of UAVs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More