

Unmanned aerial vehicle and vehicle task allocation method and system under air-ground cooperation
A technology of air-ground coordination and task assignment, which is applied in control/regulation systems, vehicle position/route/height control, instruments, etc., to achieve the effect of improving patrol efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
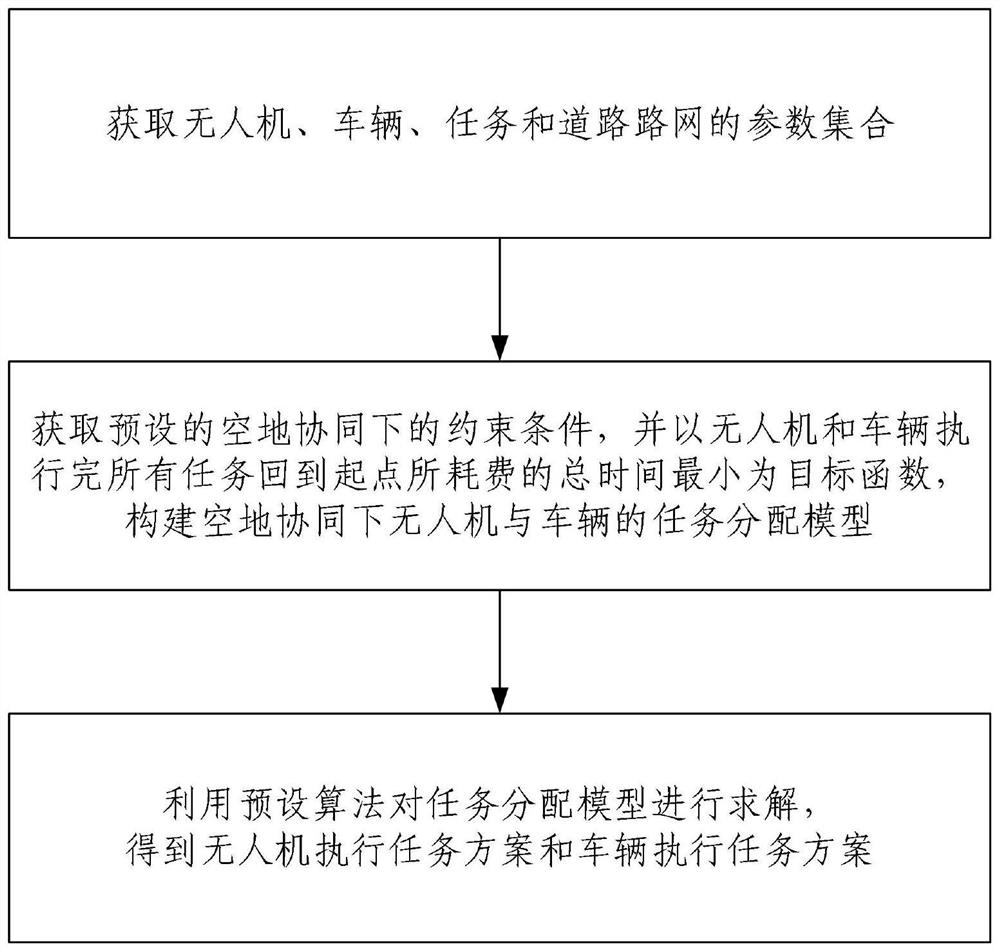
[0120] The present invention provides a method of dispensing the mandate assignment of the drone and the vehicle in a vacant synergistic, including:
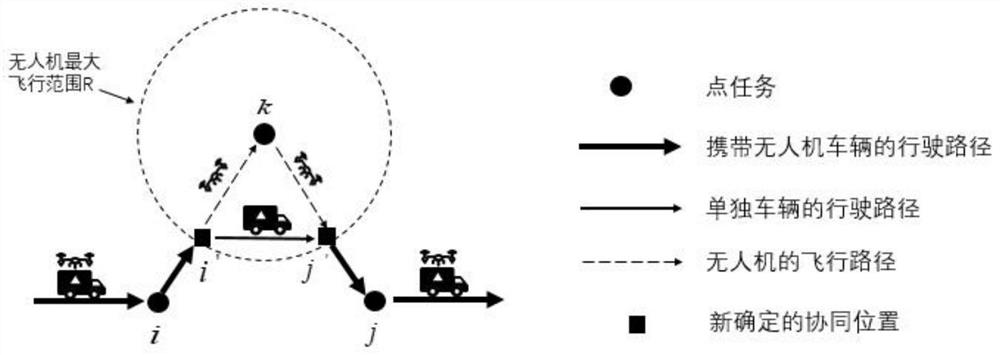
[0121] Get the parameter collection of drone, vehicles, tasks and road road networks;
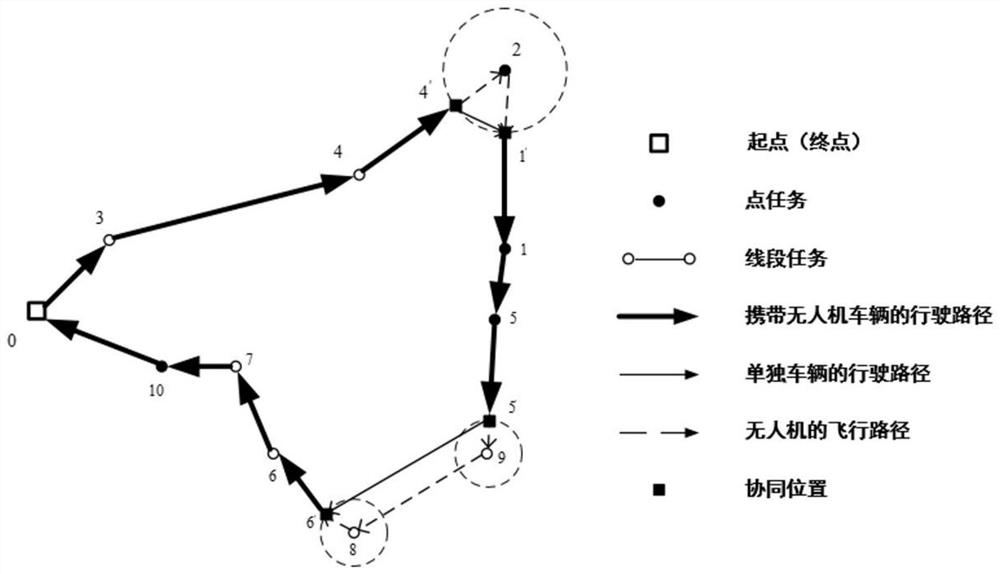
[0122] Get the constraint conditions under the preset empty collaboration, and the total time consumed by the drone and the vehicle to return to the starting point, the total time consumption is minimized for the target function, and build the task allocation model of the drone and the vehicle under the air.
[0123] The task allocation model is solved by the preset algorithm, obtaining the drone execution task scheme and vehicle execution task scheme.
[0124] The beneficial effect of this embodiment is:
[0125] Ground cooperation proposed UAV 1. The present invention allows the ability to access all of the tasks in the presence of a life time constraints.
[0126] 2. Splitting the air-ground vehicle UAV constructs, can effectively provide fast a...
Embodiment 2
[0200] The present invention further provides a system for task allocation UAV ground cooperation with the vehicle, said system comprising:
[0201] Parameter acquisition module for acquiring a set of parameters drones, vehicles, missions and the road network;
[0202] Task allocation model constructing module, for acquiring the constraint condition under a predetermined air-ground, and unmanned aerial vehicles and vehicle to perform all tasks Back End starting total time consumed as the objective function, constructed under ground cooperation UAV and task allocation model vehicles;
[0203] Model Solution module for task allocation model is solved with a preset algorithm, UAV mission programs and vehicles on missions program.
[0204] It is appreciated that the space provided in the embodiment of the present invention UAV cooperative task distribution system of the vehicle above the air-ground task allocation method corresponding to the vehicle UAVs, explanation about the content...
Embodiment 3
[0206] There is provided a computer-readable storage medium that stores the computer program UAV ground cooperation tasking vehicle, wherein, said computer program causing a computer to execute the above-described cooperative task space of the vehicle UAVs allocation method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More