

Efficient ground absolute target extraction and global optimization method
A global optimization, absolute coordinate technology, applied in the field of mobile surveying and mapping, can solve the problems of complicated operation, decreased registration accuracy, image mapping accuracy, etc., and achieves the effect of flexible and simple operation and avoiding errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0052] This embodiment provides an efficient ground absolute target extraction and global optimization method, and its specific working process includes six stages, specifically:
[0053] 1) Layout control points
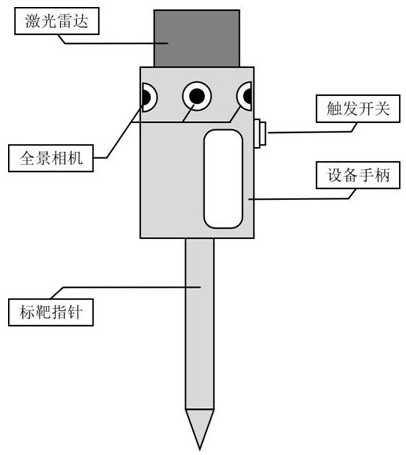
[0054] First, plan a suitable route according to the environment to be collected; then, on the collection route, arrange control point targets, which can be placed on the ground, walls, etc. place.
[0055] 2) Measuring control point coordinates
[0056] Use measuring equipment such as a total station to measure the absolute coordinates of all targets and record the numbers of the targets.
[0057] 3) Start data collection
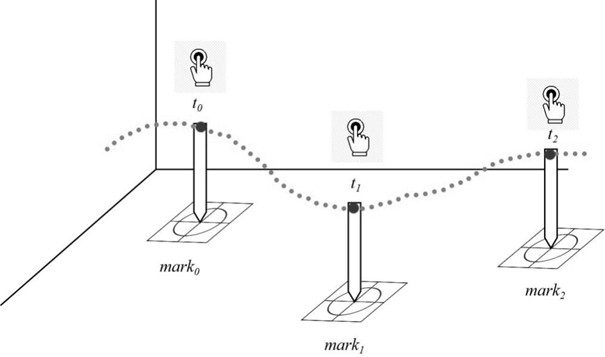
[0058] Start the data collection function of the backpack and travel along the pre-planned route.
[0059] 4) Collect target
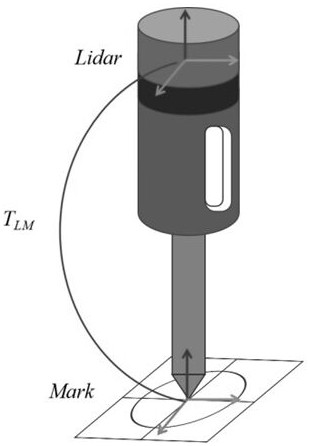
[0060] Every time you walk to a target position, touch the ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More