

Method and device for correcting transverse drift of autonomous vehicle
A self-driving and vehicle technology, applied in the field of correcting lateral drift of self-driving vehicles, can solve problems such as failure to reach the target point, unoptimized trajectory, accidents, etc., achieve good real-time performance, avoid lateral drift, and have remarkable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
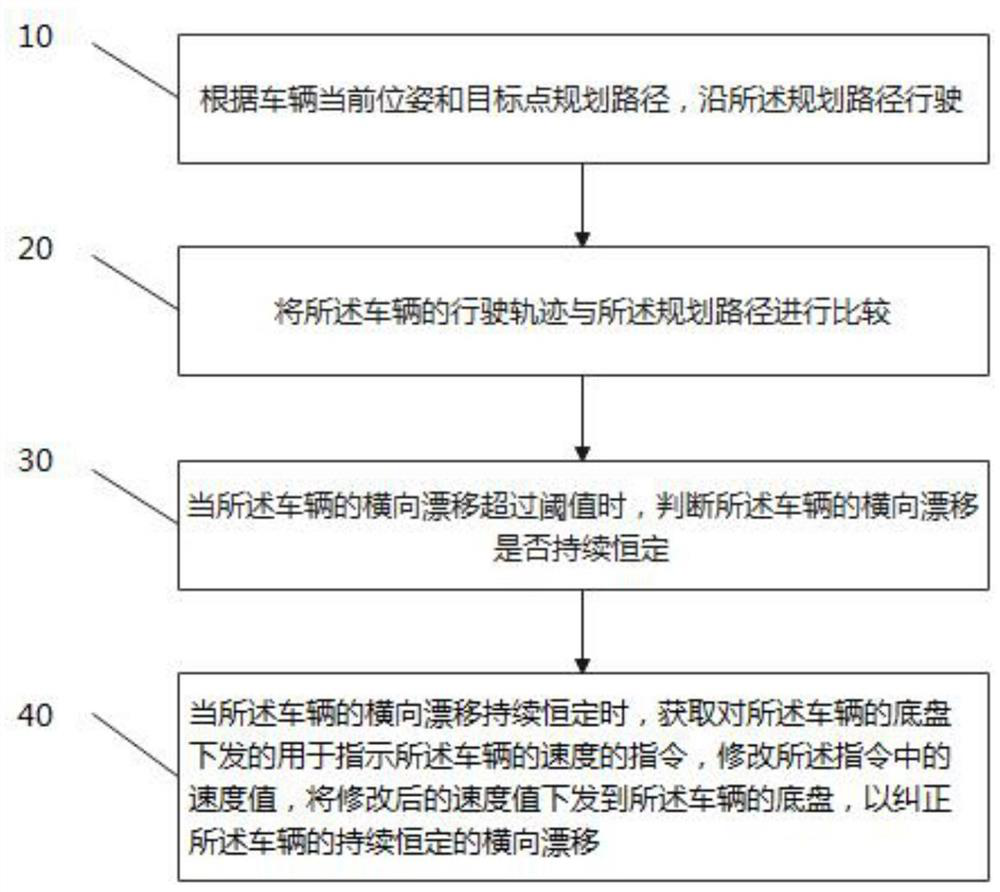
[0041] The technology of correcting lateral drift in the field of automatic driving refers to that after the path planning determines the target and trajectory, it is sent to the control module to control the vehicle. However, due to mechanical reasons, the lateral drift is unmeasurable, and the vehicle can sense the lateral drift in time. Adjust the controller and correct the pose of the vehicle to ensure the accuracy and robustness of the route. By correcting the technology of lateral drift, combined with the perception and decision-making modules in automatic driving, the problem of yaw can be solved, which is suitable for low-featured scenes such as large indoor corridors.
[0042] The method and device for correcting lateral drift of an automatic driving vehicle provided by the embodiments of the present invention are applied to an automatic driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More