Pan-tilt position self-checking method and device, storage medium and electronic device
A cloud platform and equipment technology, applied in the field of communication, can solve the problem of low control accuracy of cloud platform equipment, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention will be described in detail below with reference to the drawings and in combination with the embodiments.
[0023] It should be noted that the terms "first" and "second" in the description and claims of the present invention and the above drawings are used to distinguish similar objects, but not necessarily used to describe a specific sequence or sequence.
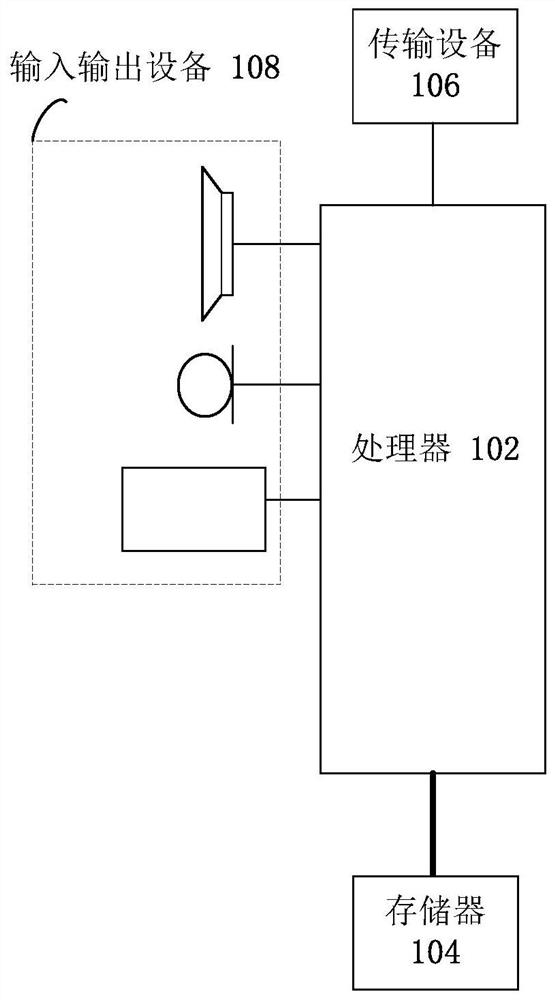
[0024] The method embodiments provided in the embodiments of the present application may be executed in mobile terminals, computer terminals or similar computing devices. Taking running on a mobile terminal as an example, figure 1 It is a block diagram of the hardware structure of a mobile terminal of a method for self-checking the position of a pan-tilt according to an embodiment of the present invention. Such as figure 1 As shown, the mobile terminal may include one or more ( figure 1 Only one is shown in the figure) a processor 102 (the processor 102 may include but not lim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



