

Space station extravehicular service robot with flexible arm and working method of space station extravehicular service robot
A service robot and space station technology, applied in the field of aviation robots, can solve problems such as interference with enemy spacecraft, and achieve the effect of mitigating the high degree of danger and reducing the task burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
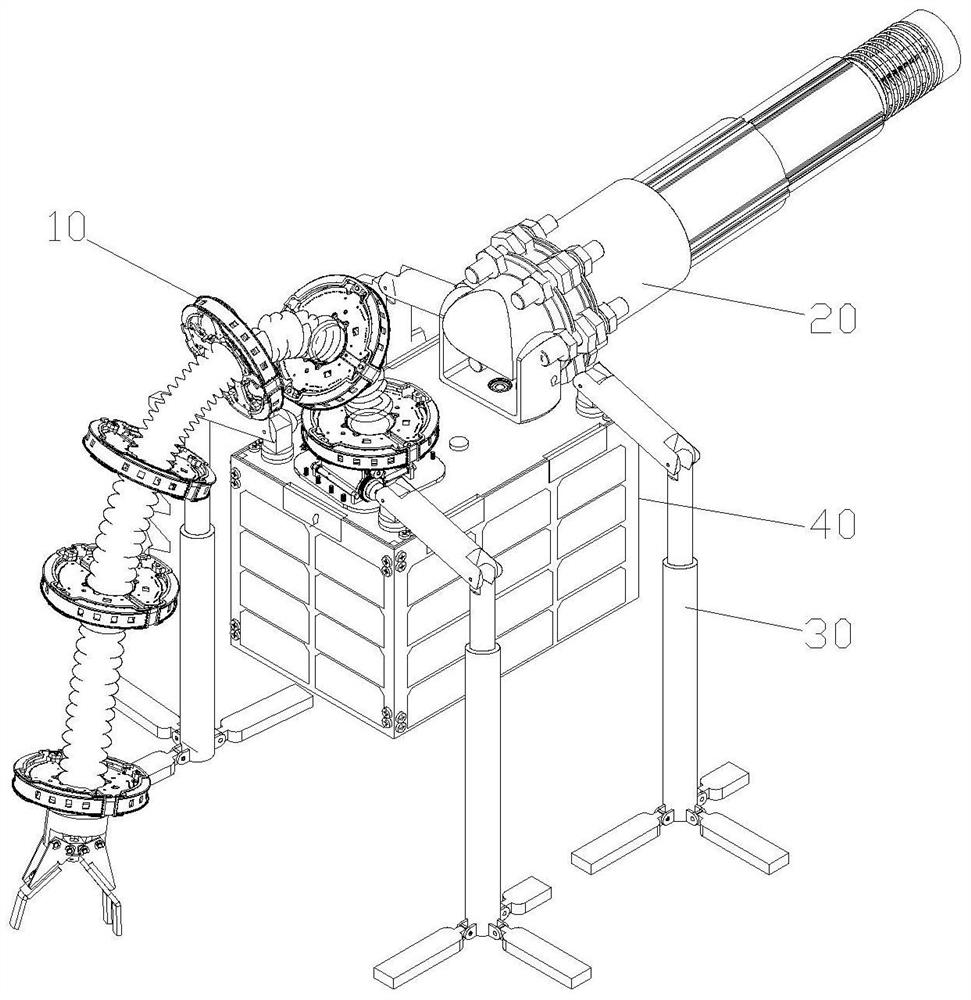
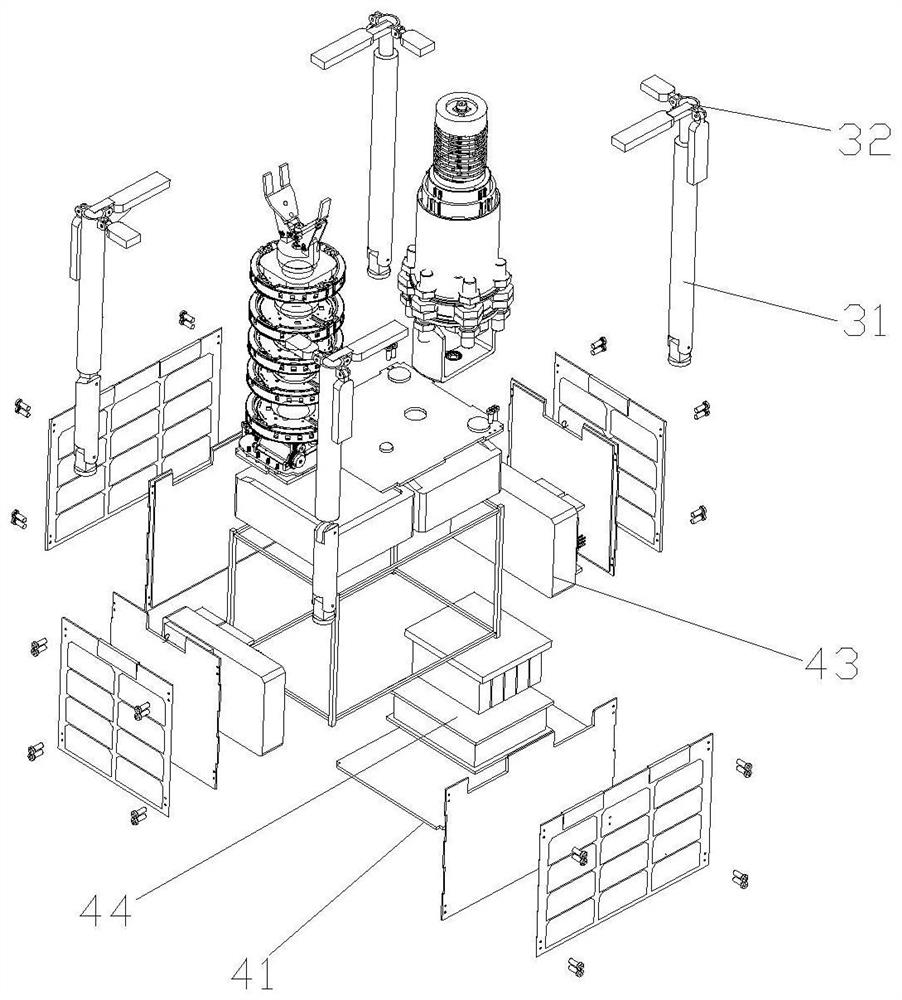
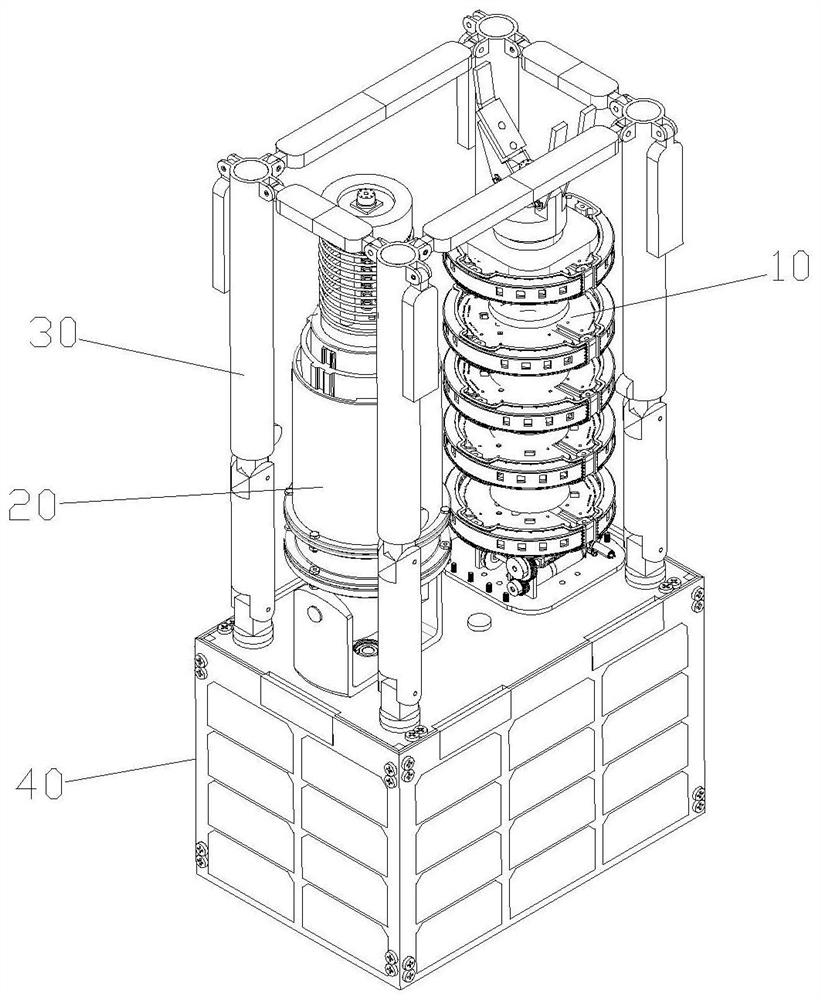
[0053] Such as Figures 1 to 8As shown, a space station extravehicular service robot with a flexible arm includes a flexible bionic maintenance mechanism 10, a flexible bionic monitoring mechanism 20, a mobile mechanism 30 and a control host 40; Inspection and maintenance of external equipment; the flexible bionic monitoring mechanism 20 is used to monitor the external surface of the space station and the state of the external equipment; the mobile mechanism 30 can be folded and unfolded, and the mobile mechanism 30 is configured to form a frame body and be sleeved on the flexible Around the bionic maintenance mechanism 10 and the flexible bionic monitoring mechanism 20, the mobile mechanism 30 is configured to move on the outer surface of the space station when deployed; the control host 40 is configured to communicate with the flexible bionic maintenance mechanism 10, the flexible bionic monitoring mechanism 20 and The moving mechanism 30 is connected, wherein the volume of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More