

Industrial robot adaptive admittance control method based on damping ratio model
A technology of industrial robot and control method, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of low control precision, achieve fast response speed, small force error, and improve precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific examples.
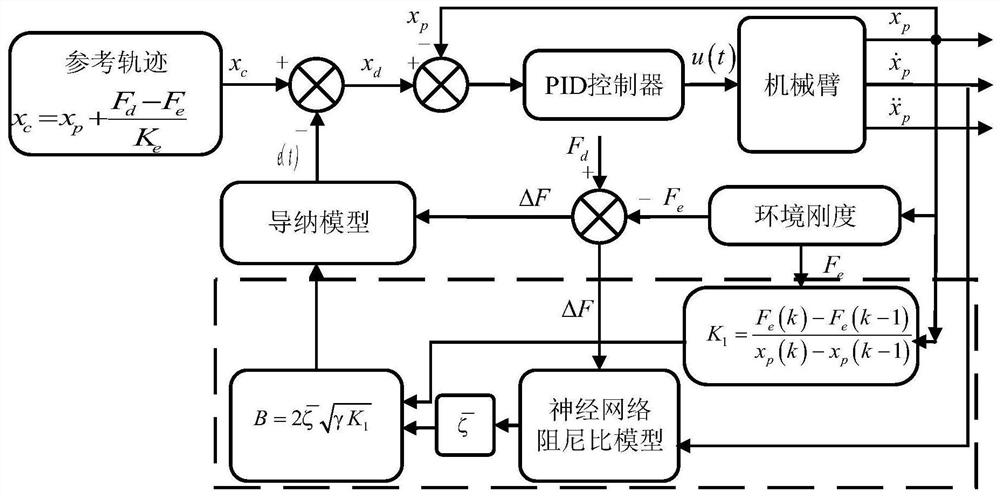
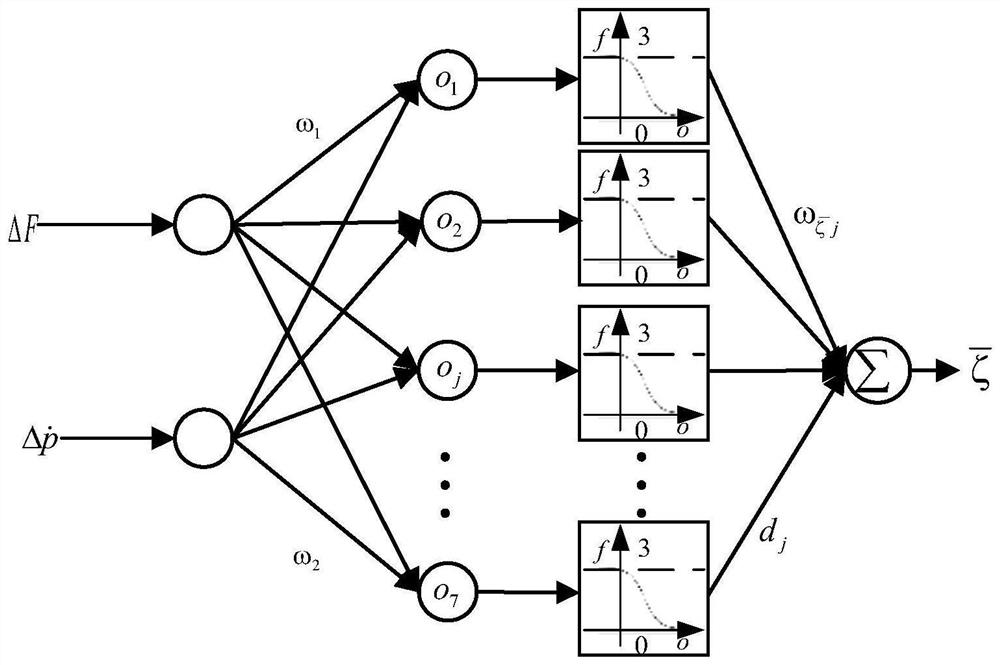
[0036] The invention avoids the modeling of the robot, designs an excitation function that can describe the relationship between the force error and the damping ratio, constructs the neural network damping ratio model, dynamically modifies the damping coefficient of the admittance controller, and indirectly adapts to the stiffness change of the terminal environment , and use the reference trajectory to compensate the reference position. In the environment of variable stiffness, constant force control is realized, overshoot caused by contact is reduced, and real-time tracking of the reference trajectory is realized at the same time.
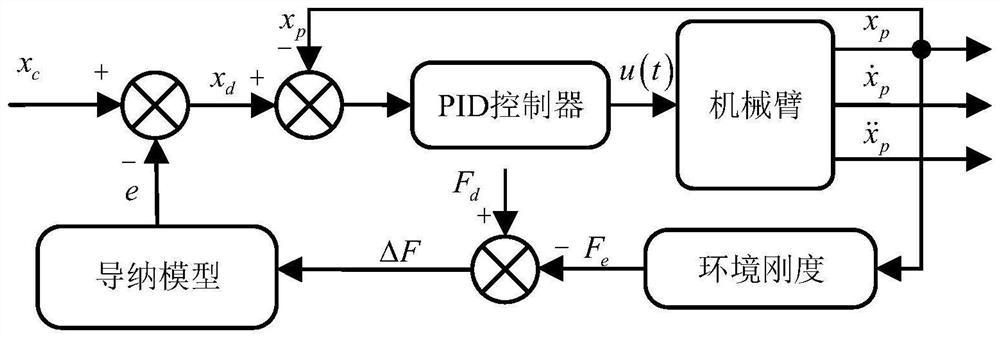
[0037] 1. Robot grinding control model
[0038] The robot needs to track and control the end contact force during the grinding process. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More