

Seven-degree-of-freedom decoupling main manipulator
A main operator and degrees of freedom technology, applied in the field of medical machinery, can solve the problem of the main operator's degrees of freedom interfering with each other
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0036] The present invention provides a seven-degree-of-freedom decoupling main operator for the problems that the existing main operator needs to convert action signals multiple times and the degrees of freedom of some main operators interfere with each other.
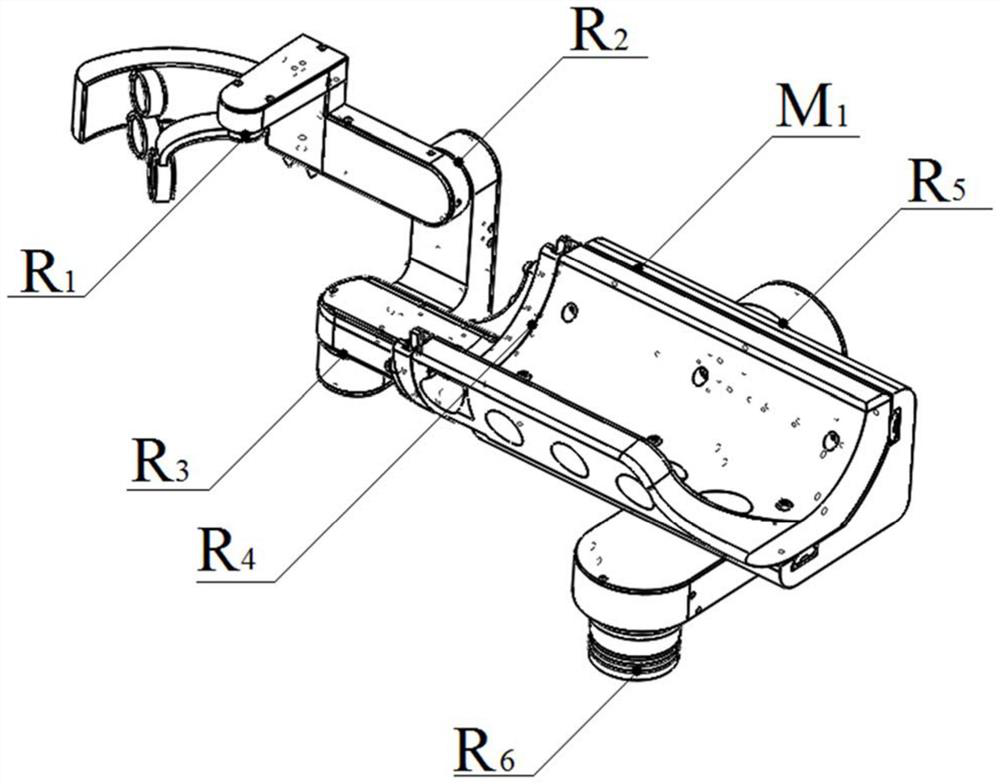
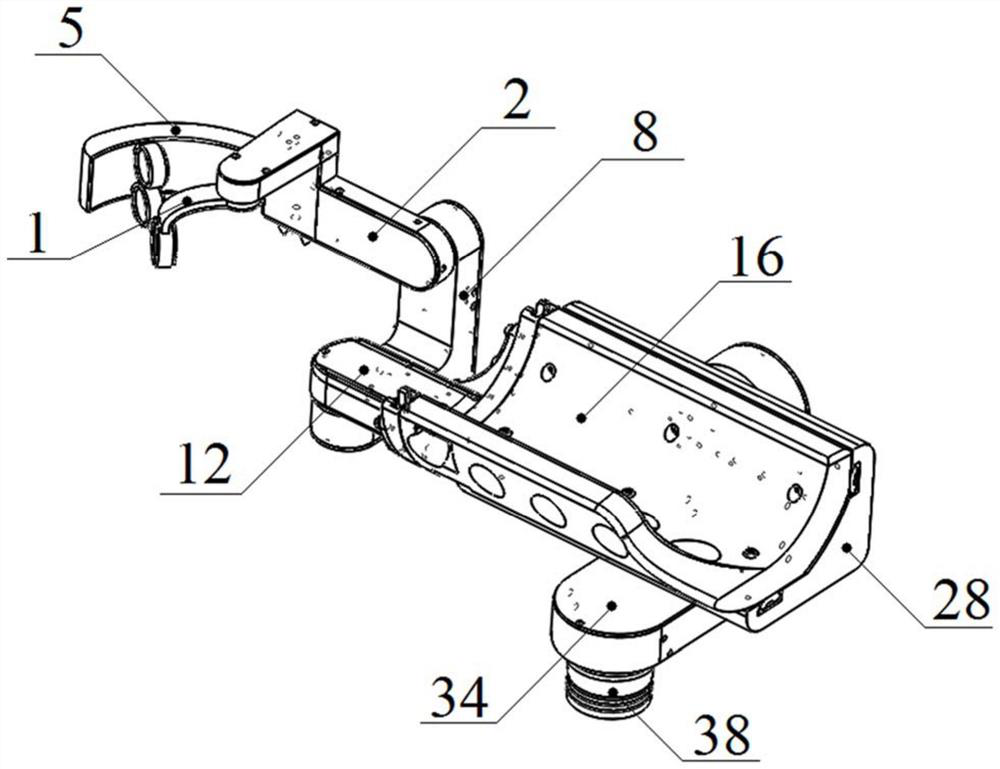
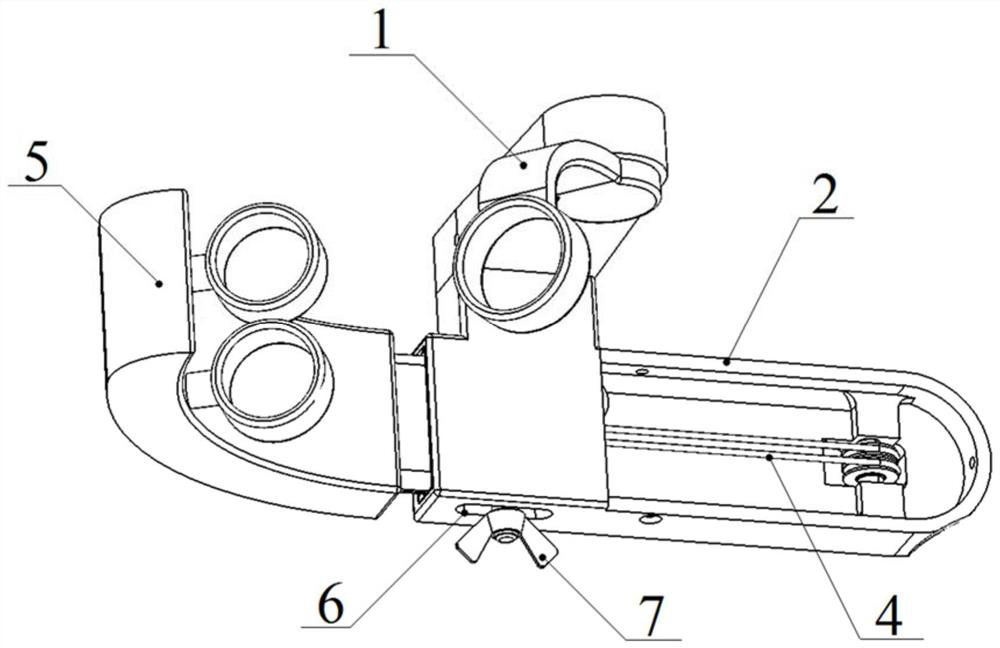
[0037] like figure 1 As shown, the embodiment of the present invention provides a seven-degree-of-freedom decoupling master manipulator, including: hand shear joint R 1 , wrist offset joint R 2 , Wrist flexion and extension joint R 3 , forearm rotation joint R 4 , forearm rollover joint R 5and elbow flexion and extension joint R 6 connected one by one; the forearm rotary joint R 4 Flip joint R with forearm 5 There is a horizontal displacement drive device M between 1 ; The hand shear joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More