

Method for planning path in complex space based on improved chaotic particle swarm
A chaotic particle swarm, path planning technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc. Improve execution efficiency, uniform distribution, convergence speed and convergence accuracy improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described in detail below in conjunction with the accompanying drawings of the description and specific implementation:
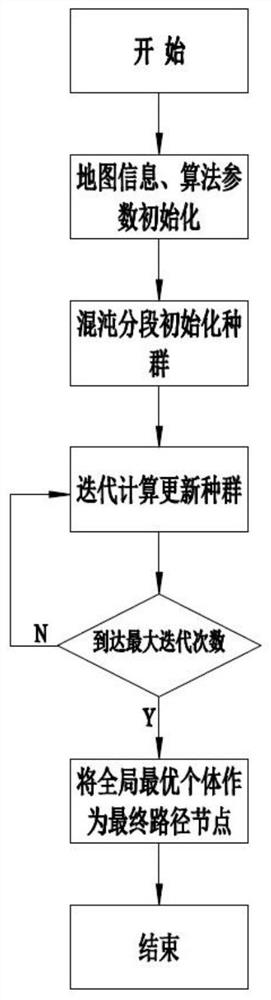
[0076] The path planning method in complex space based on the improved chaotic particle swarm of the present invention consists of figure 1 It can be seen that the specific flow of the present invention is as follows: after the start, first initialize the map information and algorithm parameters, then use the segmented chaos initialization to establish the chaotic segmentation initialization population, then use the method proposed by the present invention to perform iterative calculations, and continuously update the population until the population is satisfied. The maximum number of iterations, and finally take the global optimal individual as the final path node, and end after outputting the final path, such as Figure 1-9 As shown, the specific implementation steps of the method are as follows:
[0077] S1: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More