

A method and system for human-computer cooperation
A human-robot collaboration, human body technology, applied in computer parts, image enhancement, instruments, etc., can solve the problem that the manual selection of scenes is not efficient enough, the collaboration between collaborative robots and robot users is not efficient enough, and the collaborative robots cannot adapt to rapid scene changes, etc. problems, to achieve the effect of efficient collaboration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0039] The invention provides a human-machine cooperation method and system.
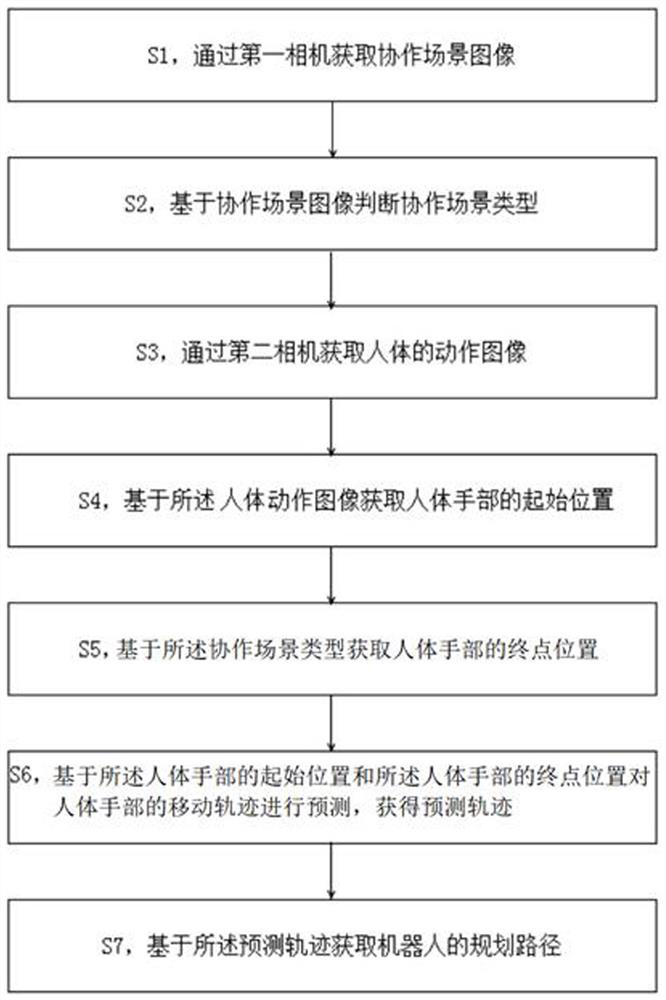
[0040] like figure 1 As shown in an embodiment, on the one hand the present invention provides a human-machine collaboration method, comprising:
[0041] S1, acquiring a collaboration scene image through a first camera;
[0042] S2, judging the collaboration scene type based on the collaboration scene image;
[0043] S3, acquiring a human body action image through a second camera;
[0044] S4, acquiring the initial position of the human hand based on the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More