

Pedestrian trajectory prediction method based on graph partition convolutional neural network (GP-CNN)
A convolutional neural network and trajectory prediction technology, applied in the field of unmanned driving prediction planning, can solve problems such as direct learning, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0043] Step 1. Divide the input scene long trajectory data into multiple short trajectory data, and further divide the generated short trajectory into observation trajectory P obs and the true trajectory P pred . P obs After different preprocessing processes, it is converted into an embedded scene graph G=(V,E), and the scene graph G generates two input values of the graph division convolutional layer GP-CNN, which are respectively defined as observation trajectories And the Laplacian matrix A of each node.
[0044] The detailed description of the specific parameters of the embodiment is as follows:
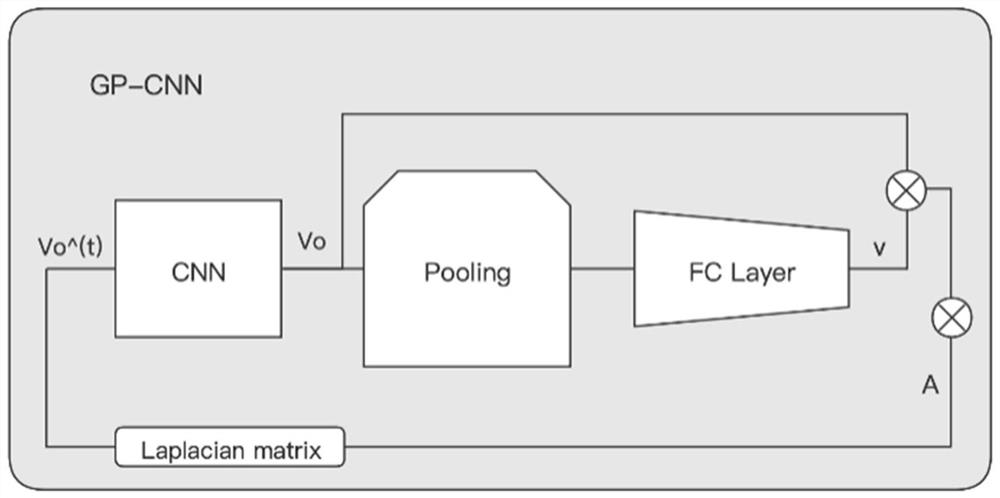
[0045] The network structure of the graph division convolutional layer GP-CNN is as follows figure 1 , through a graph consisting of a convolutional layer for feature extraction, a pooling layer for downsampling, and a fully connected layer for weight classification to divide the channel and input scene trajectory data and the corresponding Laplacian matrix channel dual ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More