Joint internal wiring structure, joint mechanism and foot type robot
An intra-joint and joint technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of wear of related components, affecting the service life of joints, increasing hidden dangers, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
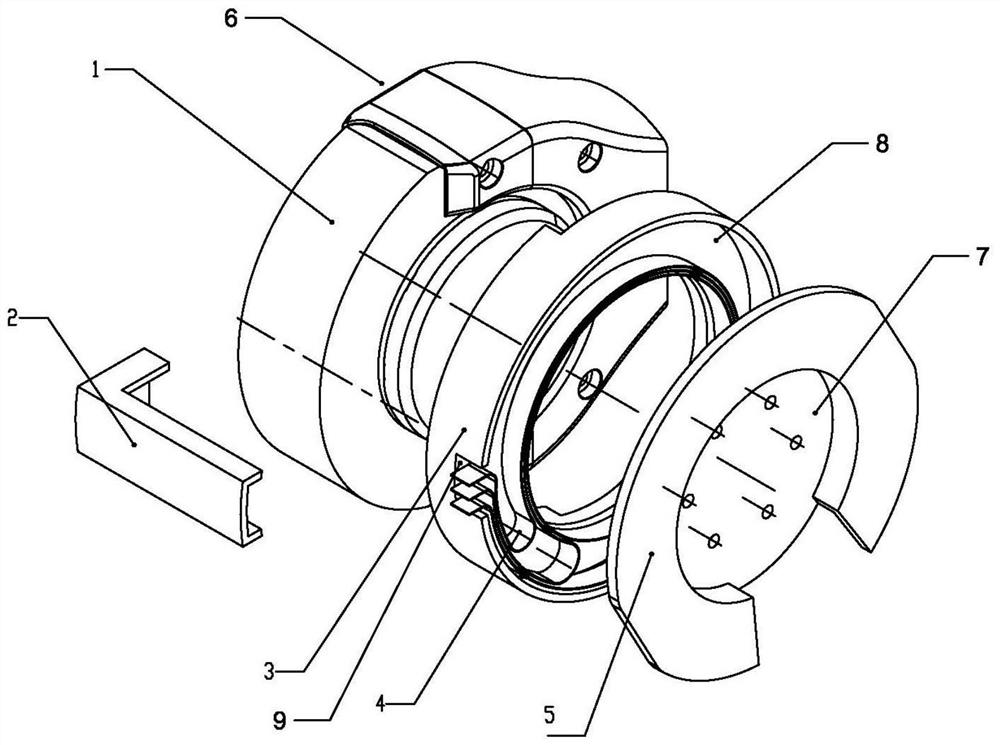
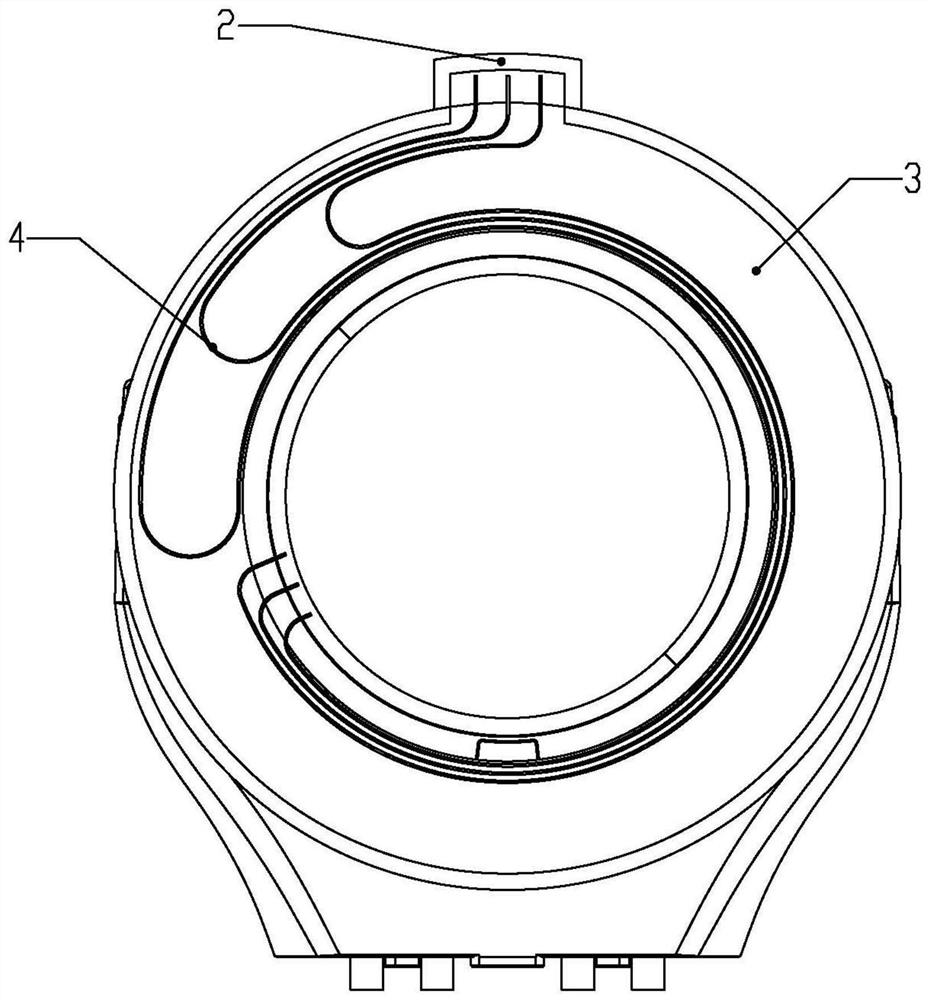
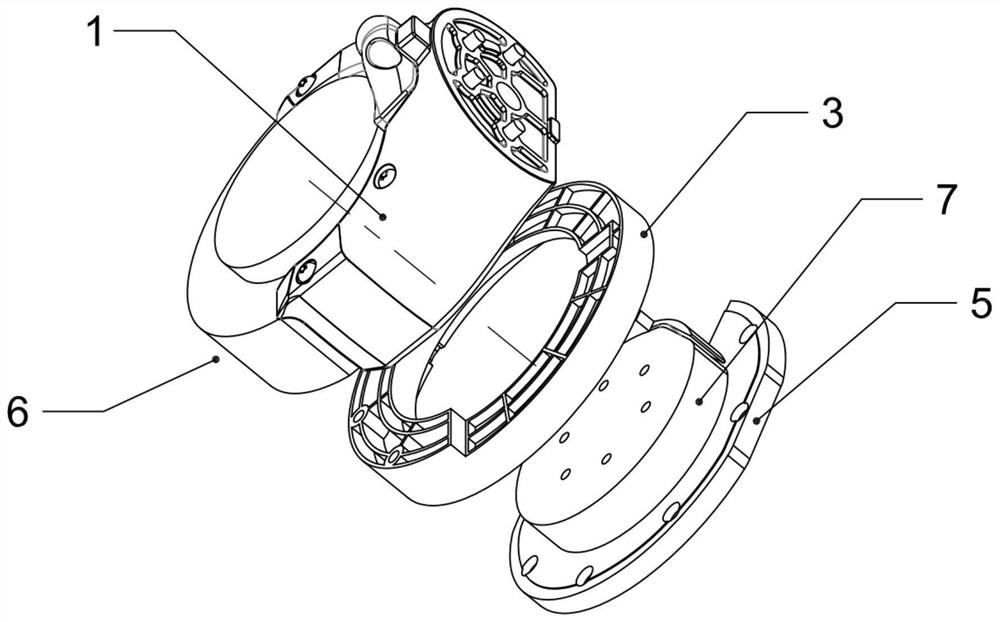
[0083] The cable 4 is a bendable cable, the cable is moderately soft and hard, and can be bent repeatedly at will. One end of the cable is fixed on the winding part 7, and the other end is wound on the winding part 7. After being bent outwards in the opposite direction, it is fixed on the first winding body 3; when the first winding body 3 and the second winding body 5 rotate relatively, the cable 4 can contact with the first winding body 3 and the winding portion 7 respectively.
[0084] Therefore, the winding arrangement of the cable can make the first winding body 3 and the second winding body 5 always stick to the winding part 7 or the inner wall of the first winding body 3 during the reciprocating rotation, so that This can further ensure that the cable 4 is always kept neat and not stuck during the reciprocating rotation process.
[0085] Furthermore, the shape of the flat cable is flat, and the bending radius is small under the premise of ensuring the bending life of t...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap