Integrated multi-degree-of-freedom unipolar electric hook
A degree of freedom and integrated technology, applied in the field of medical devices, can solve problems such as inability to combine rotation, pitch and deflection, complex processing and assembly processes, unreasonable design of internal wire routing, etc., to achieve optimal direction and reliability High and safe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
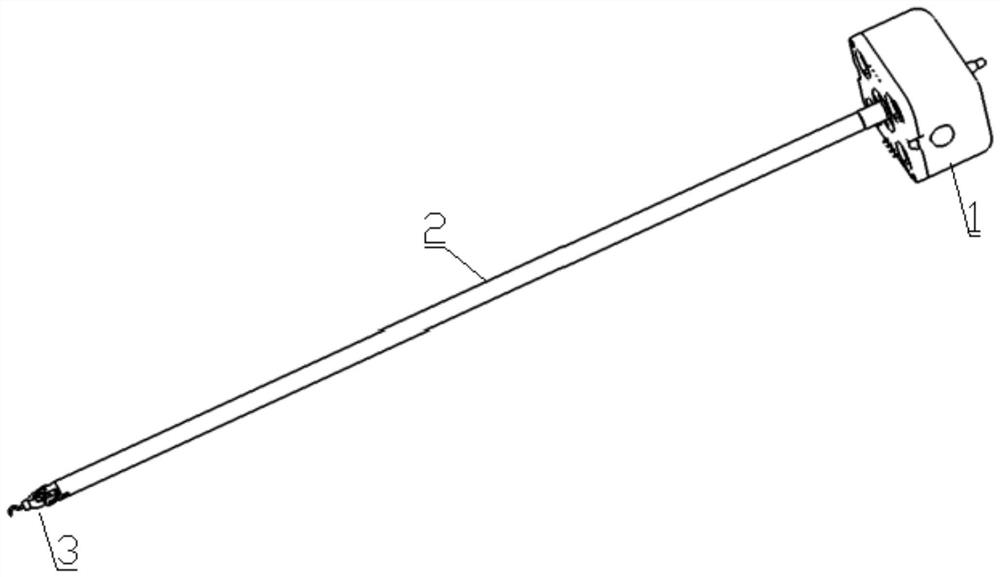
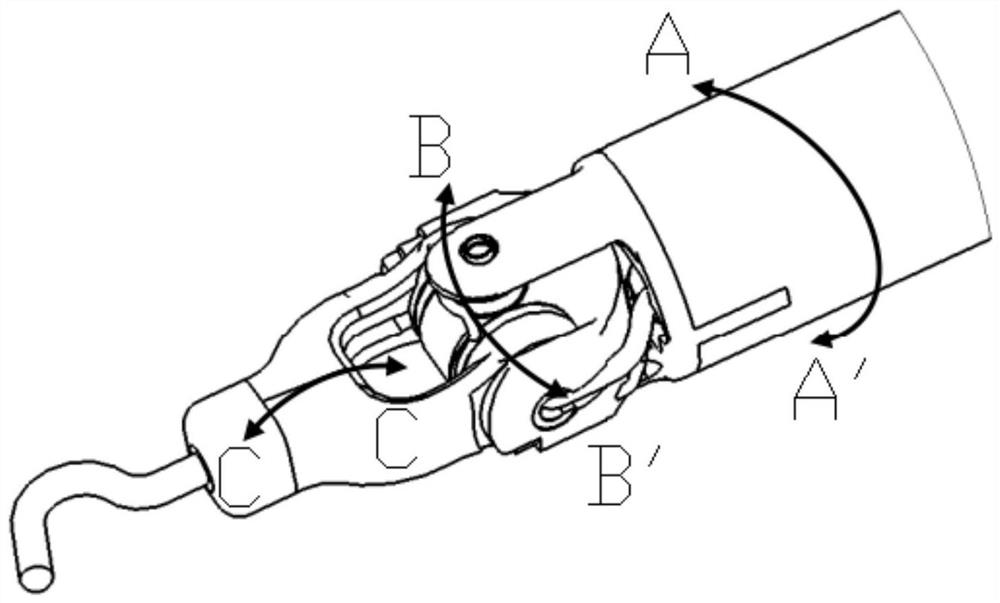
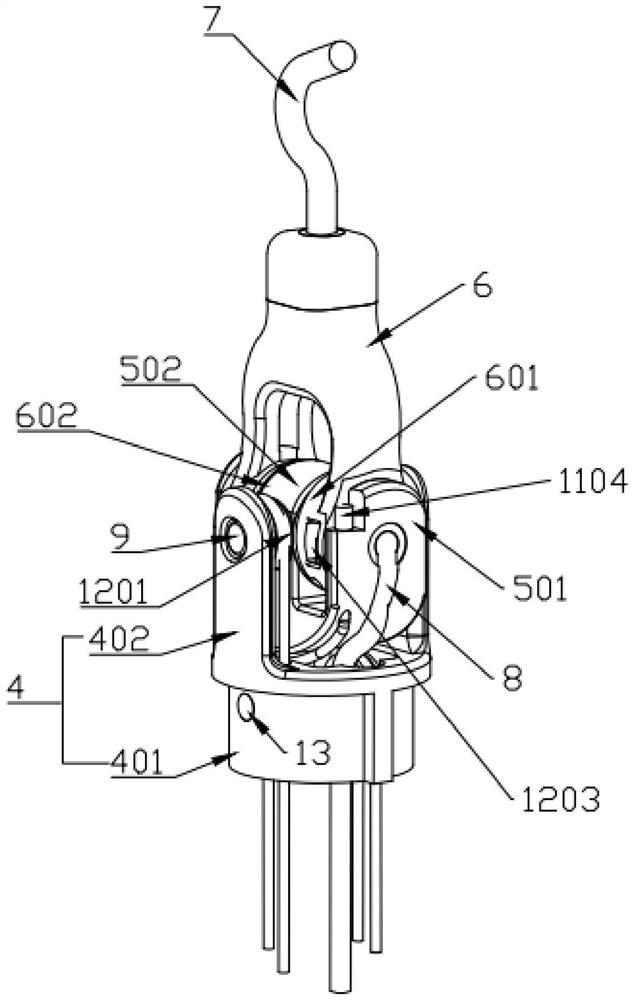
[0030] Such as Figure 1-9 In the shown embodiment, an integrated multi-degree-of-freedom monopolar electric hook includes an instrument case 1, an instrument shaft 2 and an end effector 3 connected in sequence, the instrument shaft 2 is rotationally connected with the instrument case 1, and the end effector 3 includes connecting seat 4, pitch ring 5, electric hook support 6, electric hook 7 and wire 8, wherein:
[0031] The connecting seat 4 includes a connecting pipe 401 and connecting ears 402 symmetrically arranged on the upper end surface of the connecting pipe 401, the connecting pipe 401 is used for connecting with the instrument rod 2, and the connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com