

Industrial robot center distance adjusting ring
A technology of industrial robots and center distance, applied in manipulators, manufacturing tools, etc., can solve problems such as low installation efficiency and poor transmission accuracy, and achieve the effects of improving installation efficiency, improving production convenience, and simplifying shapes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
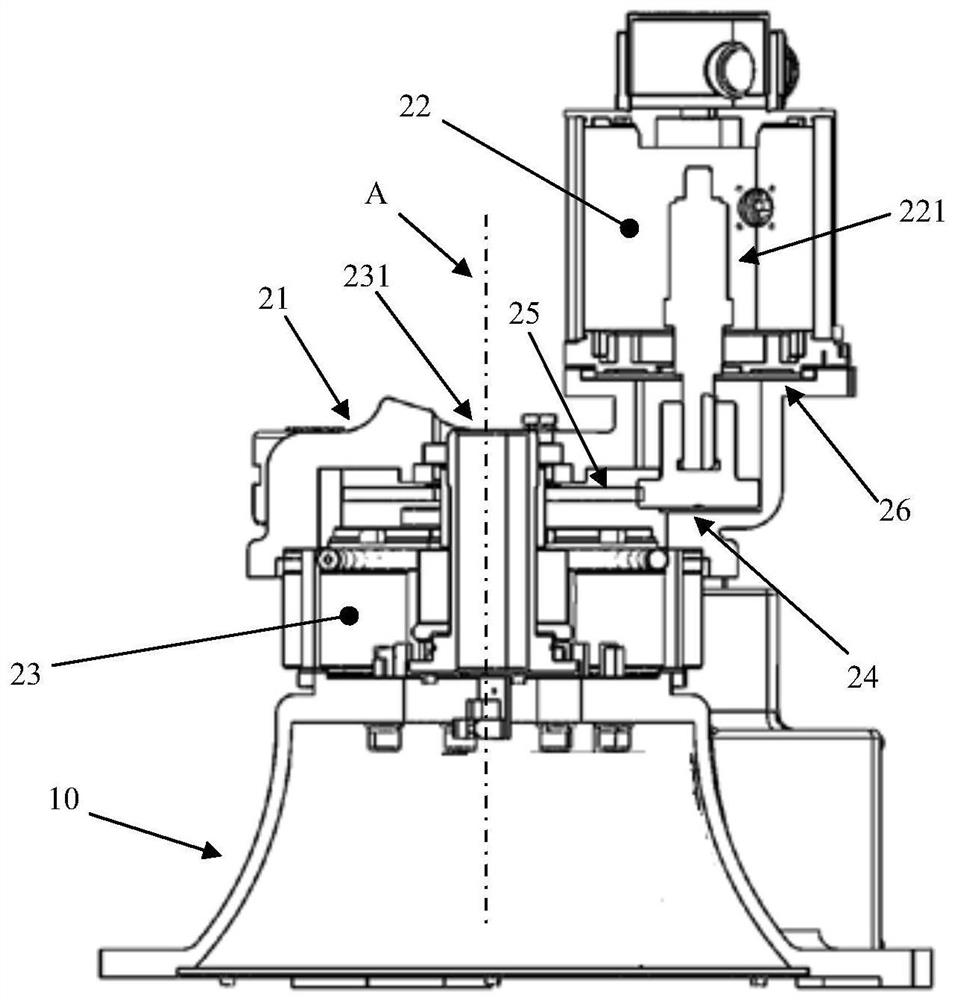
[0031] During the installation process of the components of each joint of the industrial robot, the machining error of each component and the installation error are progressive and finally affect the meshing parameters between the output gear of the motor and the input gear of the reducer, while the output gear of the motor and the input gear of the reducer The error between the gears can be eliminated by adjusting the center distance. Therefore, adjusting the distance between the output shaft of the motor and the input shaft of the reducer can correct various errors and adjust the output gear of the motor and the input gear of the reducer to the designed meshing state.
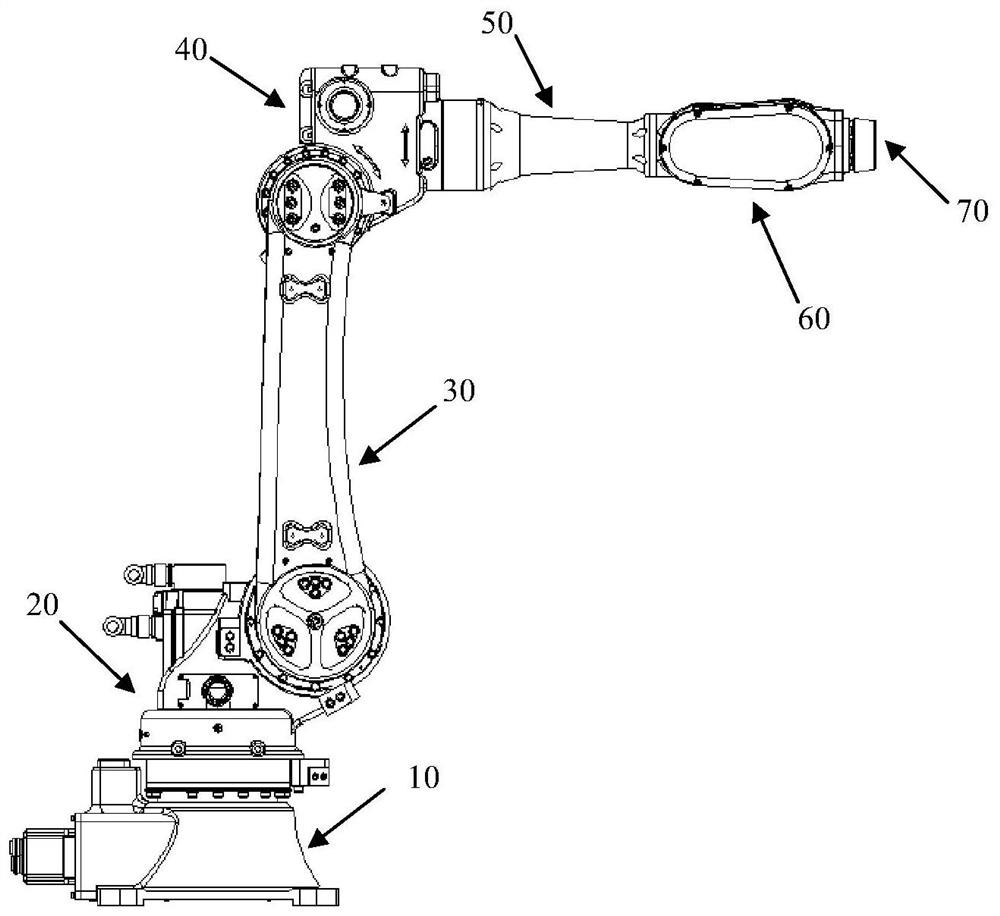
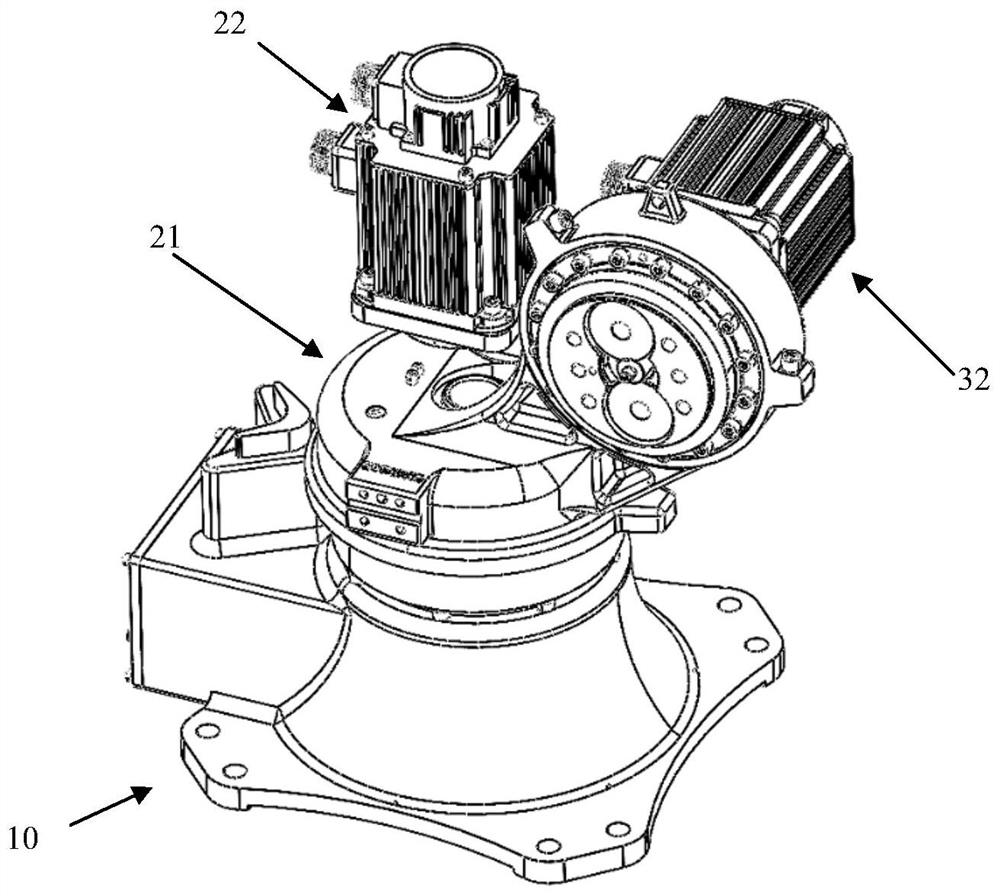
[0032] To this end, the present invention provides an industrial robot, which includes one or more joints equipped with center distance adjusting rings. Install the center distance adjusting ring into the joint to adjust the center distance between the output shaft of the joint motor and the input shaft of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More