

Clamping-controllable fruit lossless picking end effector and control method thereof
An end effector, controllable technology, applied in the direction of picking machine, program control, electrical program control, etc., can solve the problems of excessive clamping force, small clamping force, fruit damage, etc., to achieve convenient control and avoid clamping The effect of sustaining damage and increasing success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
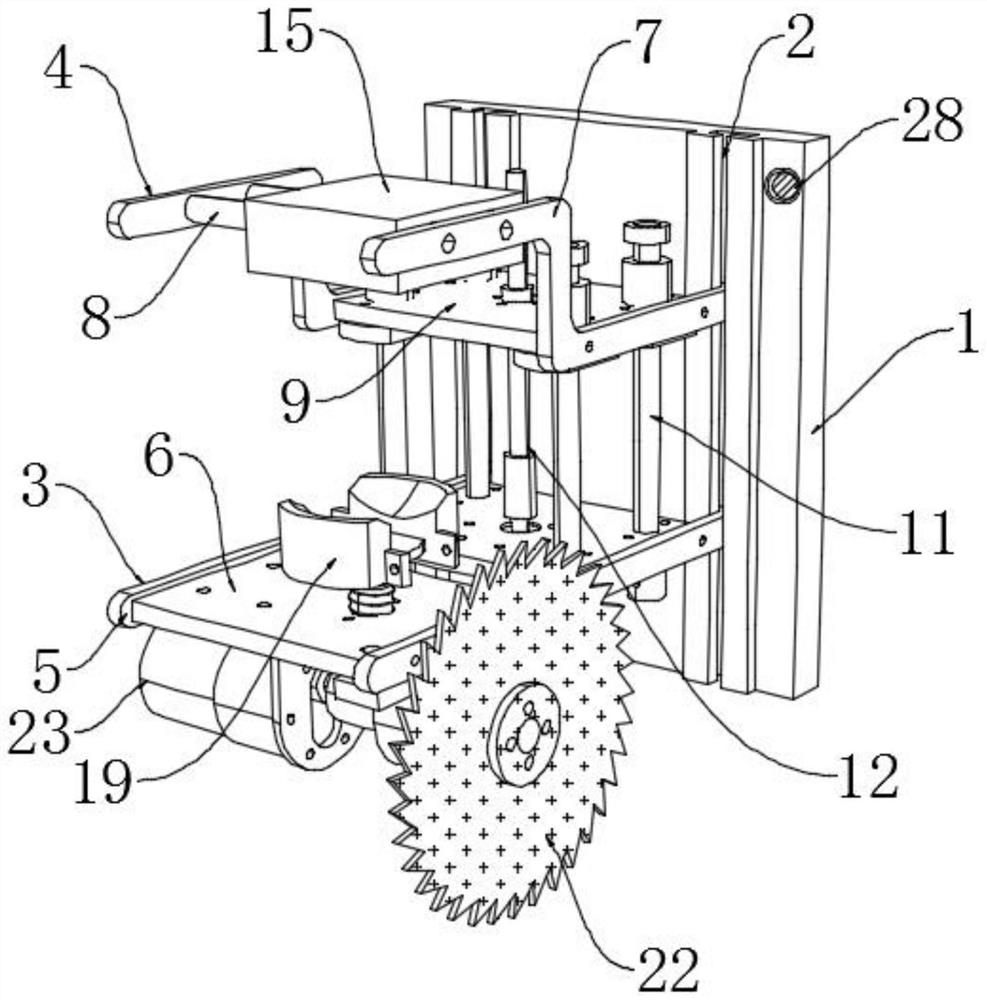
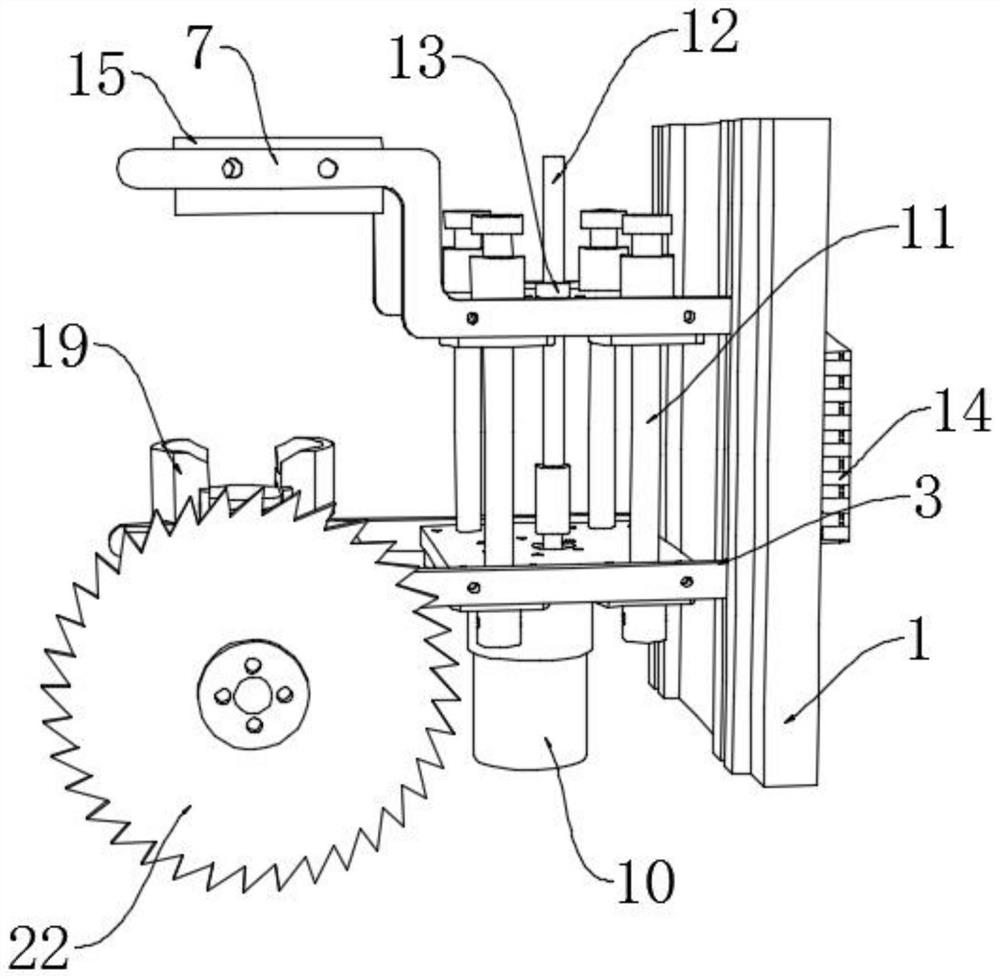
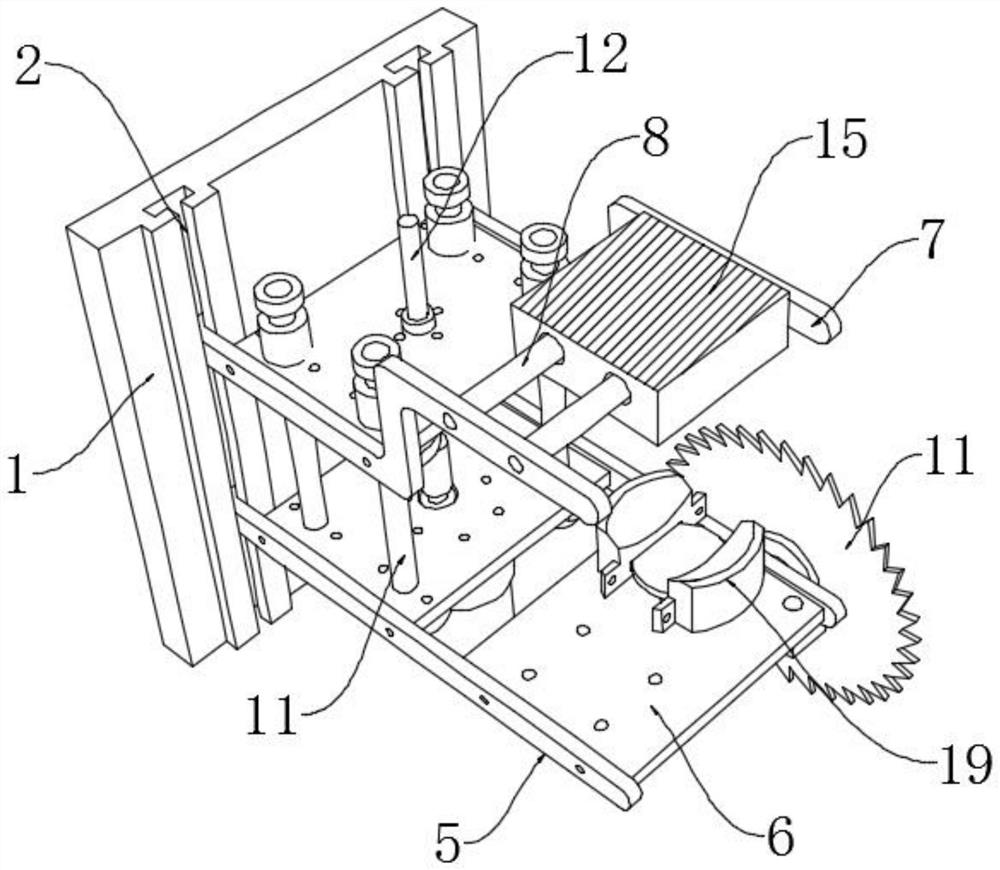
[0046] see Figure 1-10 , the present invention provides a clamping and controllable fruit non-destructive picking end effector, which includes a sliding positioning seat 1, a spacing adjustment assembly is installed on the inner side of the sliding positioning seat 1, a dynamic clamping assembly is added to the spacing adjustment assembly, and a dynamic clamping assembly is added below the spacing adjustment assembly. Equipped with fine-tuning cutting components;
[0047] The spacing adjustment assembly includes two sets of parallel rails 2, fixed frame parts 3, sliding frame parts 4 and power parts. The bottom end of the inner wall of the seat 1, the sliding frame part 4 is slidably installed on the top of the inner wall of the sliding positioning seat 1, and the sliding fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More