

AGV real-time path gauge and anti-collision method and system
A real-time path planning and anti-collision technology, applied in the field of AGV navigation, can solve the problems of difficult to meet demand, large number of grid picking and loading points, and complexity, so as to reduce the computational workload, simplify the path calculation and Anti-collision calculation, the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
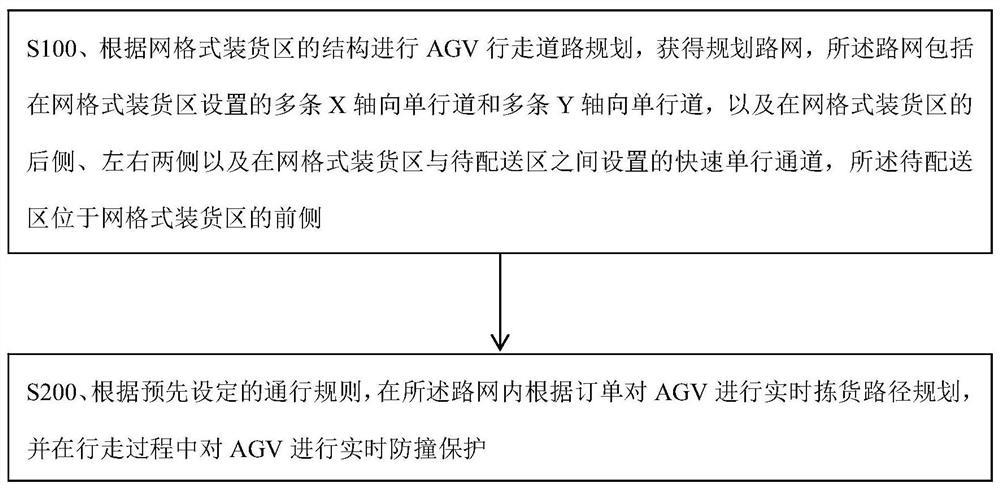
[0079] like figure 1 As shown, the present embodiment proposes an AGV real-time path planning and collision avoidance method, the method comprising:
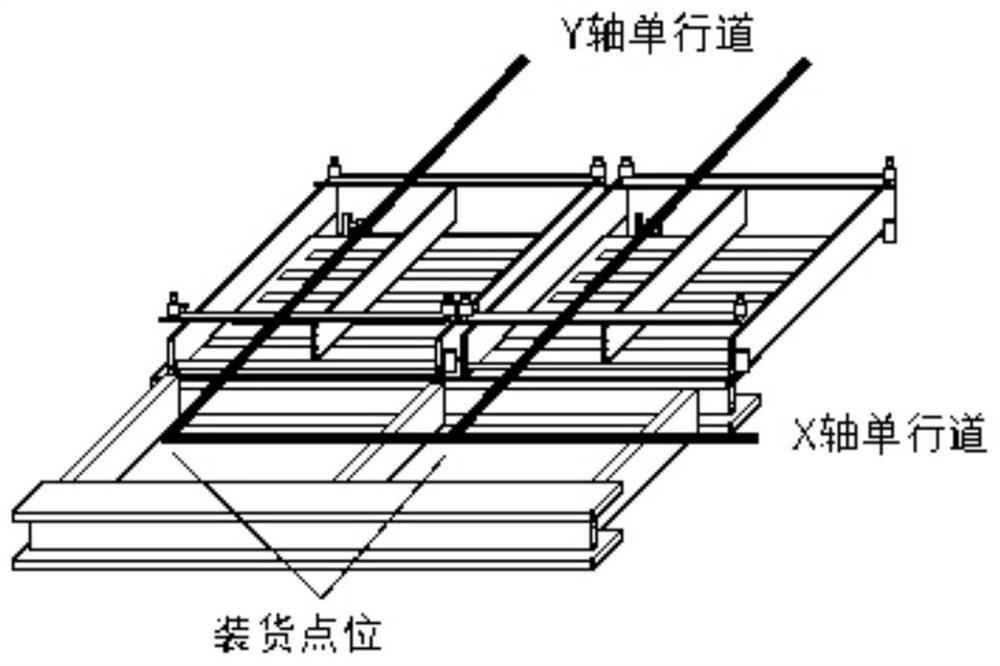
[0080] S100, carry out AGV walking road planning according to the structure of the grid format loading area, and obtain the planned road network, the road network includes multiple X-axis one-way streets and multiple Y-axis one-way streets set in the grid format loading area, And fast one-way passages are set on the rear side, left and right sides of the grid-style loading area and between the grid-style loading area and the area to be delivered, and the area to be delivered is located on the front side of the grid-style loading area.
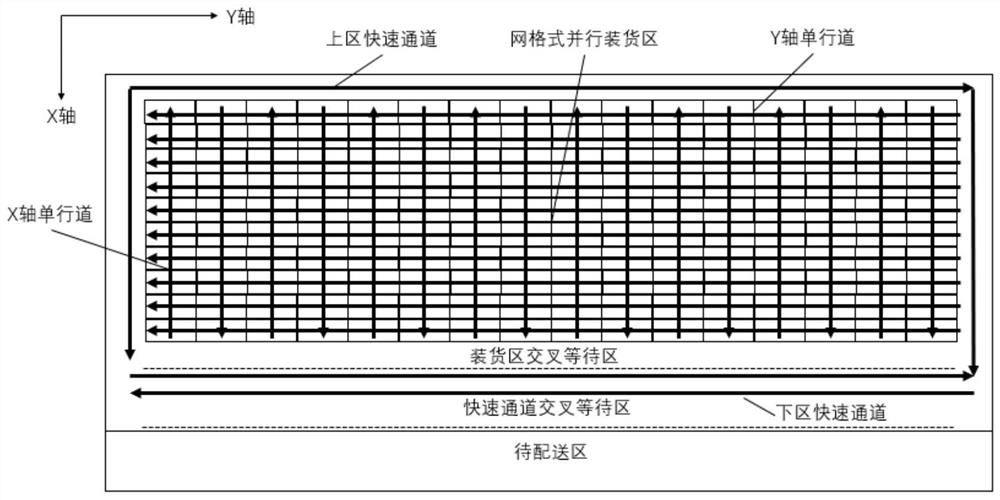
[0081] In this embodiment, the road network includes two schemes, scheme one: as image 3 As shown, the multiple one-way lanes in the Y-axis are only set in the negative direction of the Y-axis, and the rear side of the grid-shaped loading area is set up with a fast one-way lane in the positive ...
Embodiment 2
[0141] Corresponding to the above-mentioned embodiment 1, this embodiment proposes an AGV real-time path planning and collision avoidance system, and the system includes:
[0142] The road network planning module is used to plan the AGV walking road according to the structure of the grid loading area, and obtain the planned road network. The road network includes multiple X-axis one-way streets and multiple Y Axial one-way lanes, and fast one-way passages set on the rear side, left and right sides of the grid-style loading area and between the grid-style loading area and the area to be delivered, the said area to be delivered is located at the edge of the grid-style loading area front side;
[0143] The real-time path planning and anti-collision module is used to plan the real-time picking path for the AGV according to the order in the road network according to the preset traffic rules, and perform real-time anti-collision protection for the AGV during the walking process.
...
Embodiment 3
[0146] Corresponding to the above-mentioned embodiments, this embodiment proposes a computer storage medium, which contains one or more program instructions, and one or more program instructions are used to be used by an AGV real-time path planning and collision avoidance system Carry out the method as embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More